

Tail end motion control method and system for arm support
A motion control and boom technology, which is applied to control/adjustment systems, non-electric variable control, and simultaneous control of multiple variables, etc., can solve the problem that the acceleration of the boom end cannot be adjusted in real time, and the acceleration of the boom end cannot be accurately and effectively controlled. , poor control effect, etc., to achieve the effect of smooth speed change, good control, and good acceleration control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
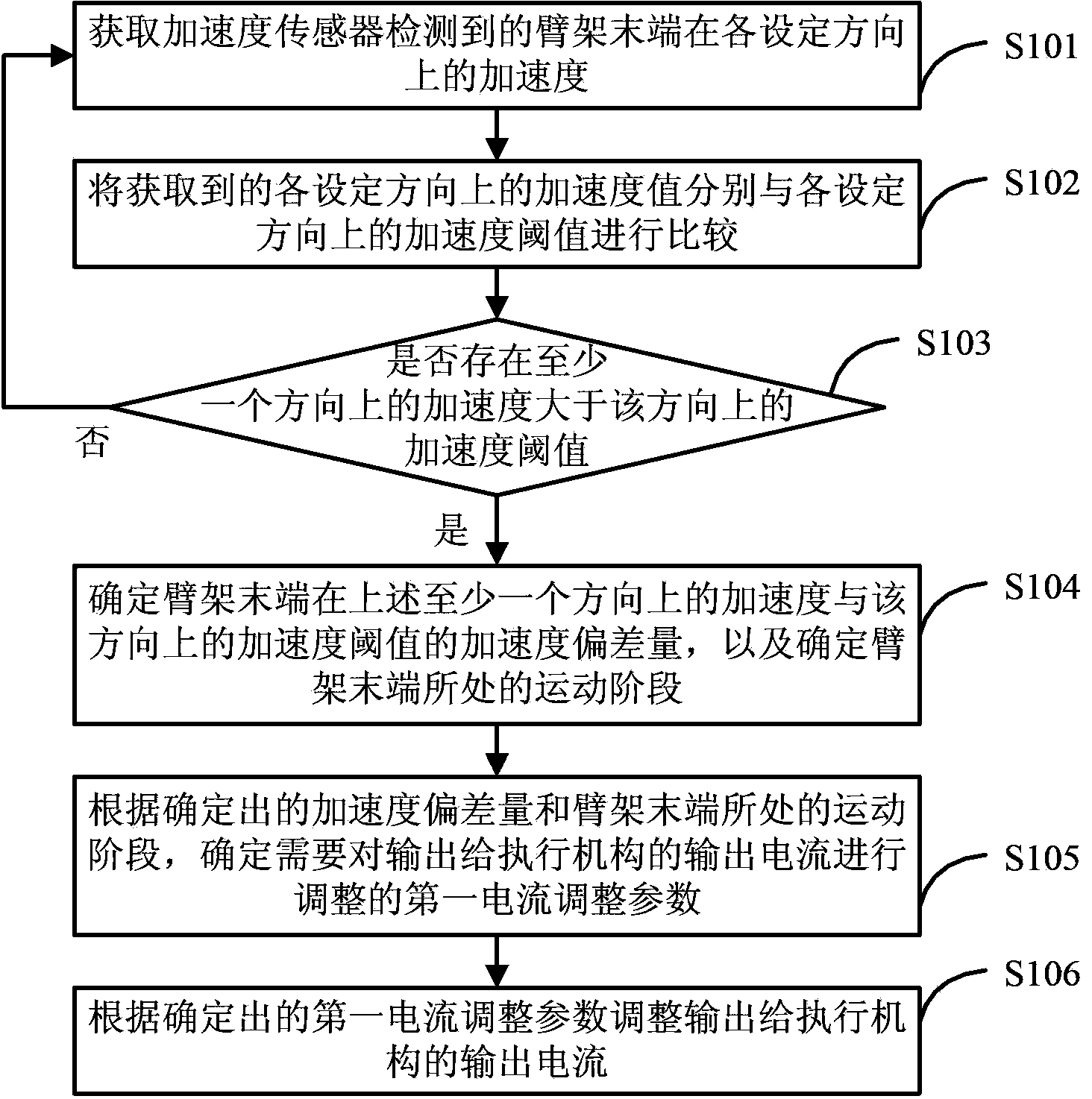
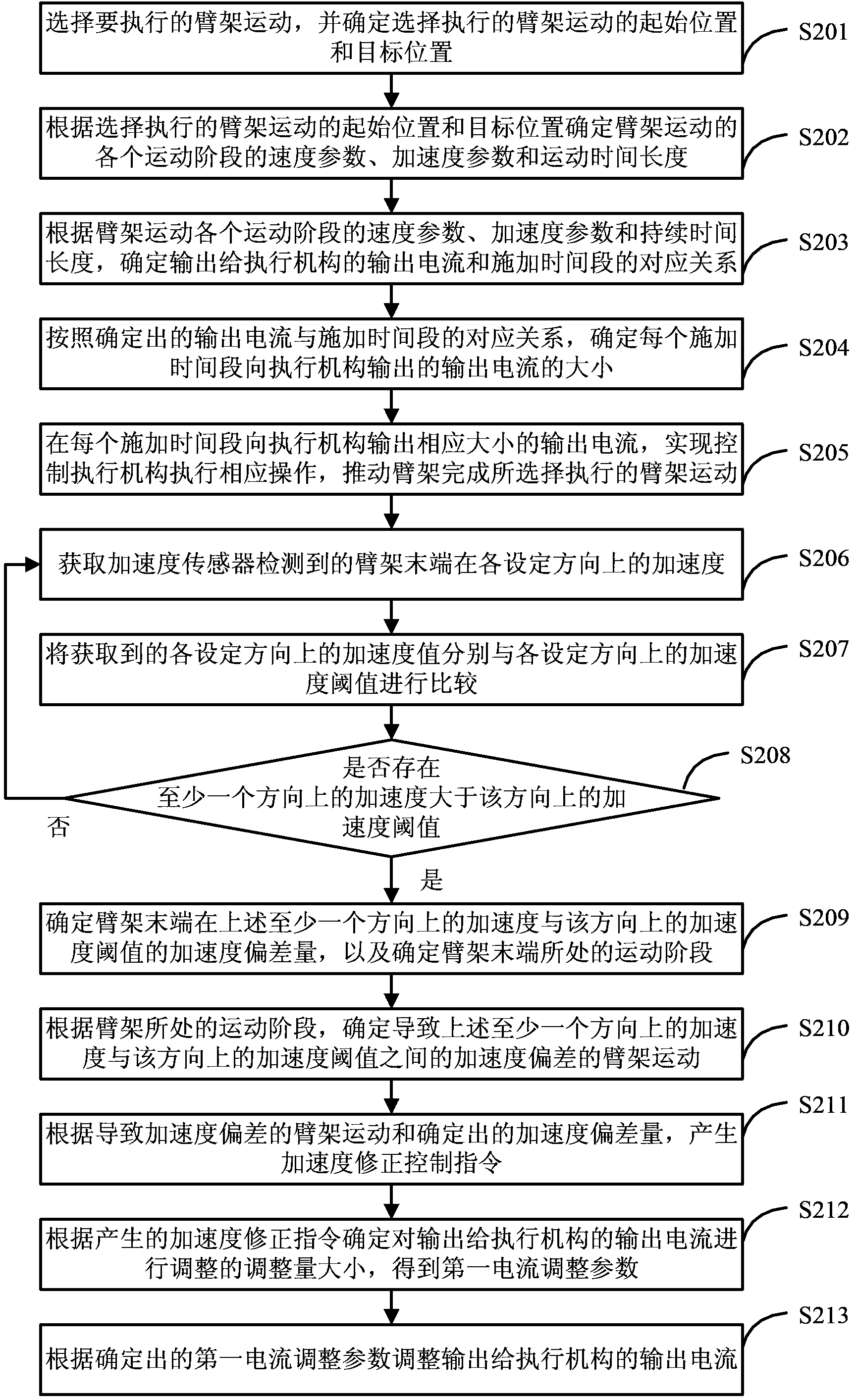
[0051] The method for controlling the motion of the end of the boom provided by Embodiment 1 of the present invention describes in detail the process of realizing the motion control under the automatic control mode of the end of the boom. This process includes the process of automatic control of the motion of the boom and the acceleration adjustment during the motion of the boom process, the method flow is as follows figure 2 shown, including the following steps:
[0052] Step S201: Select the jib movement to be executed, and determine the start position and target position of the jib movement selected to be executed.
[0053] Step S202: Determine the speed parameters, acceleration parameters and motion time lengths of each movement stage of the selected boom movement according to the starting position and the target position of the selected boom movement.
[0054] The automatic control mode is generally suitable for knowing the starting position and target position of the b...
Embodiment 2
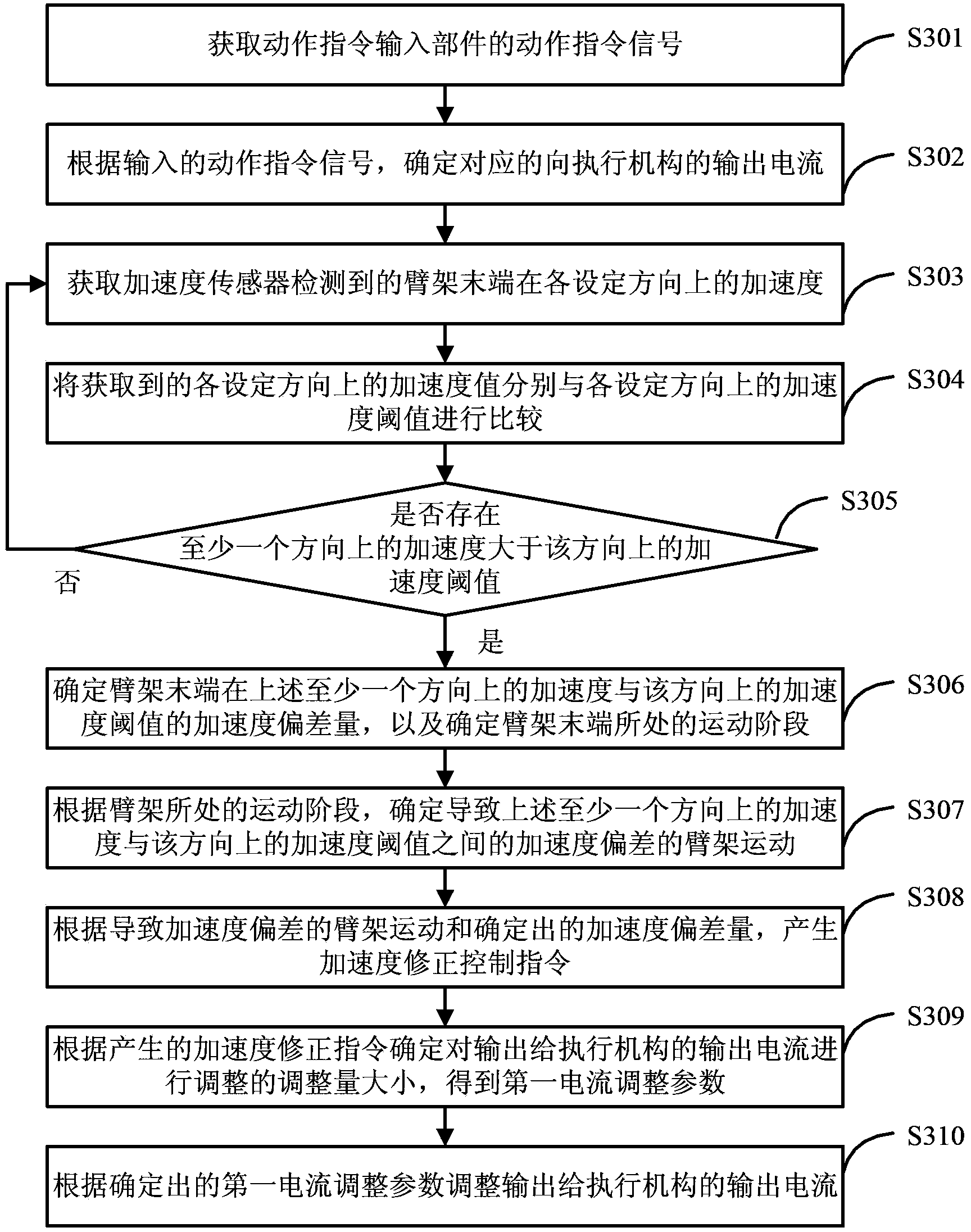
[0095] The motion control method for the end of the boom provided in Embodiment 2 of the present invention is described in detail for the implementation process of motion control in the manual operation control mode of the end of the boom. The flow of the method is as follows image 3 shown, including the following steps:
[0096] Step S301: Obtain an action instruction signal of an action instruction input component.
[0097] The action command input component package may be a handle or a switch device, and in the manual operation mode, the action command is input by the action command input component such as the handle or the switch device.
[0098] Step S302: Determine the corresponding output current to the actuator according to the input action command signal.
[0099] The action command signal input by the handle can be a proportional signal, and the proportional signal input by the handle directly corresponds to the magnitude of the output current output from the progr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More