

Hand Tracking Method for Arbitrary Hand Shape
A human hand and hand shape technology, applied in the field of gesture interaction, can solve problems such as low precision, gesture control fatigue, and slow movement speed, etc., achieve high real-time performance, low computing cost, and improve tracking accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The technical solution will be further described below in conjunction with multiple drawings.
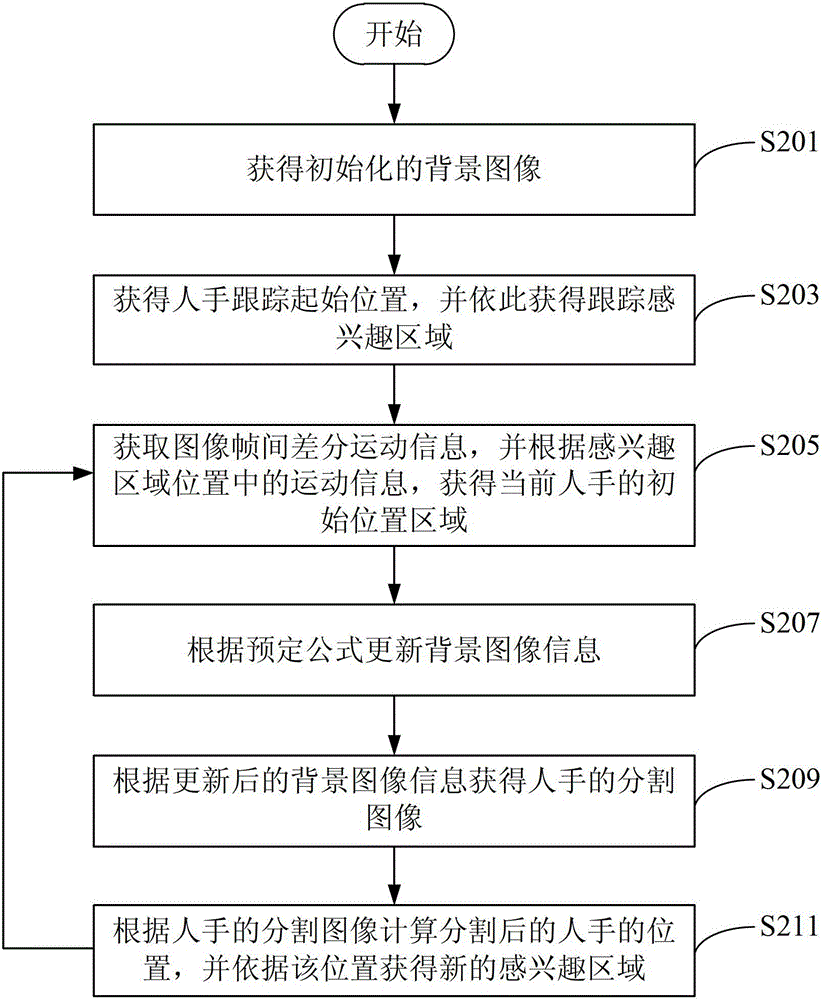
[0019] see figure 1 , an embodiment of the present invention provides a method for tracking a human hand with arbitrary hand shape and improving accuracy based on a background model. The method comprises the steps of:
[0020] Step S201: Obtain an initialized background image. Specifically, this step adopts the average method, using the formula: Average the image frames (sequence) obtained within a period of time T to obtain an initialized background image, where B 0 Indicates the initialized background image, I i Indicates the i-th image frame.
[0021] Step S203: Obtain the starting position of the human hand tracking according to the background image, and obtain the tracking region of interest accordingly. In this embodiment, the gesture detection classifier is used to search for the position of the human hand in the image, and a circular area with a radius of r cen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More