

Non-cooperative target abutting measurement method based on additional sighting distance
A technology of non-cooperative target and measurement method, which is applied in the field of non-cooperative target proximity measurement based on additional line-of-sight to achieve the effect of reducing the conditions for rendezvous and docking and improving the measurement accuracy of the whole process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
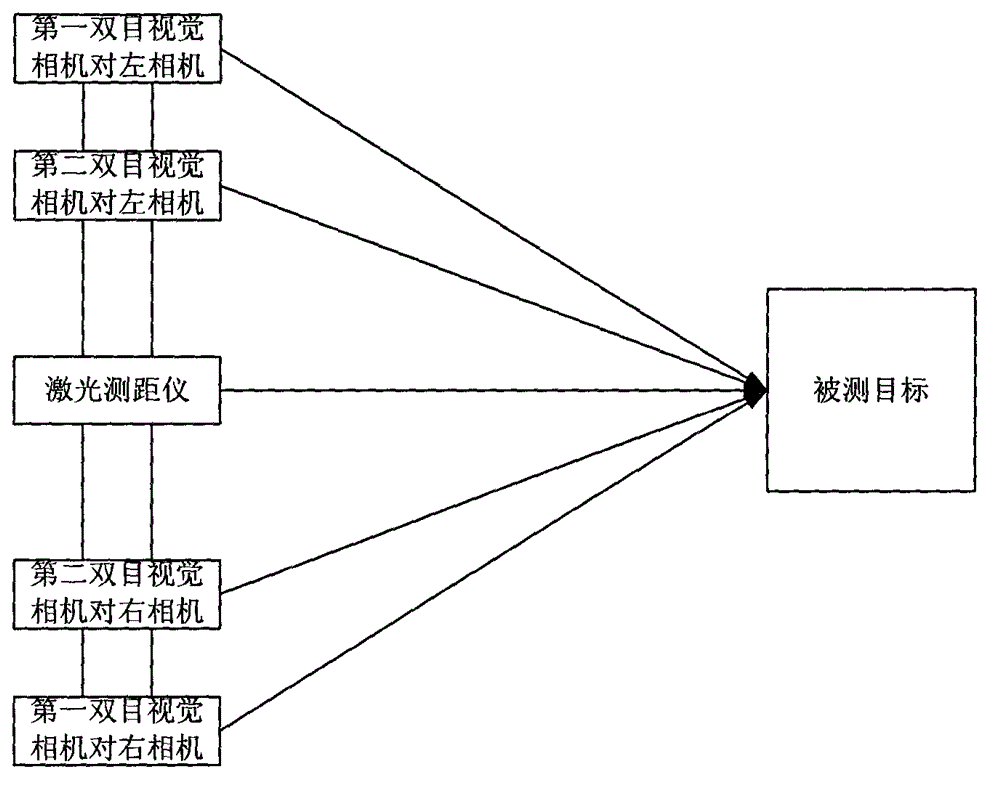
[0063] Such as figure 1 As shown, the baseline of the long-baseline binocular measurement system (the first pair of binocular vision cameras) is longer and located on both sides; the baseline of the short-baseline binocular measurement system (the second pair of binocular vision cameras) is shorter and located in the middle. The two sets of binocular measurement systems are installed on the platform of the mobile spacecraft, and the spatial layout can be adjusted according to the needs, as long as the measurement coordinate systems of each set of binocular measurement systems are strictly calibrated to determine the mutual position relationship. The measurement system can collect its own image storage and processing through the data processing system. The data processing system can use an embedded processor with similar functions to DSP, or it can use an ordinary computer to work. The data processor of the dual-baseline binocular vision measurement system is equipped with info...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Length | aaaaa | aaaaa |
| Field of view | aaaaa | aaaaa |
| Length | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More