

Method of unmanned plane image real-time splicing
A drone and image technology, applied in image enhancement, image data processing, graphic image conversion, etc., can solve the problems of unsatisfactory stitching speed and large amount of image data, to ensure real-time performance and narrow the matching search range. , the effect of improving the actual combat level and battlefield awareness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
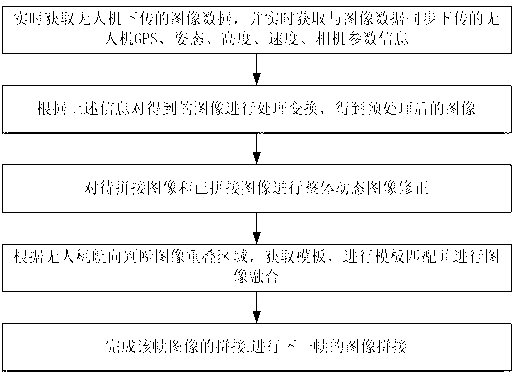
[0019] In the present invention, the images taken by UAVs have the advantages of matching the GPS coordinates, altitude, speed, and attitude information and other parameter data corresponding to the images, and propose a real-time stitching of UAV images combined with UAV flight parameters. method to complete the real-time and fast splicing of UAV images. Such as figure 1 shown, including the following steps:
[0020] (1) Obtain the image data downloaded by the drone in real time, and obtain the GPS, attitude, altitude, speed, and camera parameter information of the drone synchronized with the image data in real time;
[0021] (2), process and transform the obtained image according to the information in step (1), and enter step (3) after obtaining the preprocessed image;
[0022] (3) Perform overall dynamic image correction on the image to be stitched and the stitched image;
[0023] (4) Preliminarily judge the image overlapping area according to the heading of the UAV, obt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More