

Biped walking movement mechanism
A mobile mechanism and frame technology, applied in the field of three-degree-of-freedom bipedal walking mobile mechanism, can solve problems such as the need to load motors and the inability of the four-bar mobile mechanism to realize the line-changing motion function
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] specific implementation plan
[0021] The present invention will be further described in conjunction with accompanying drawings.
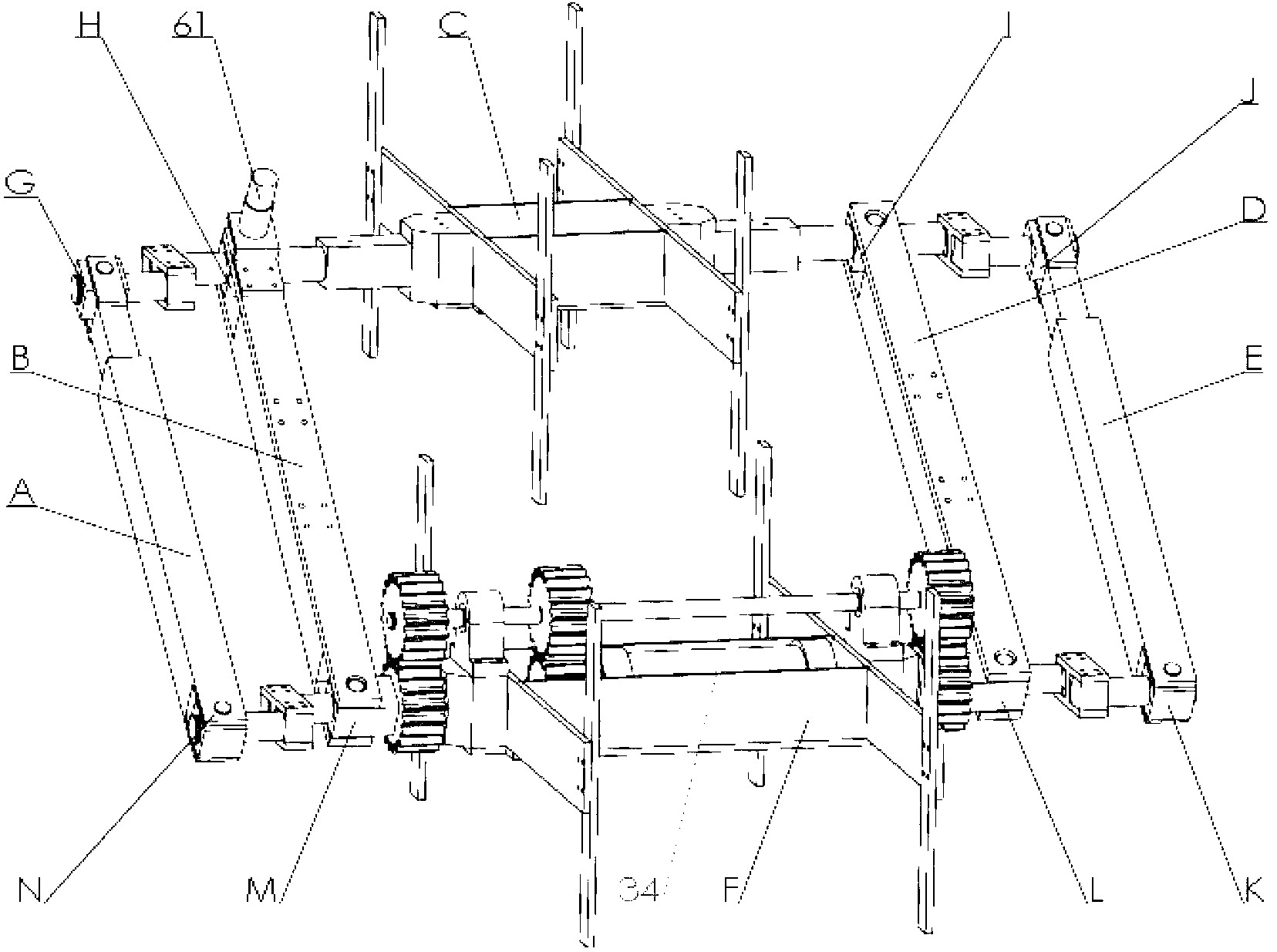
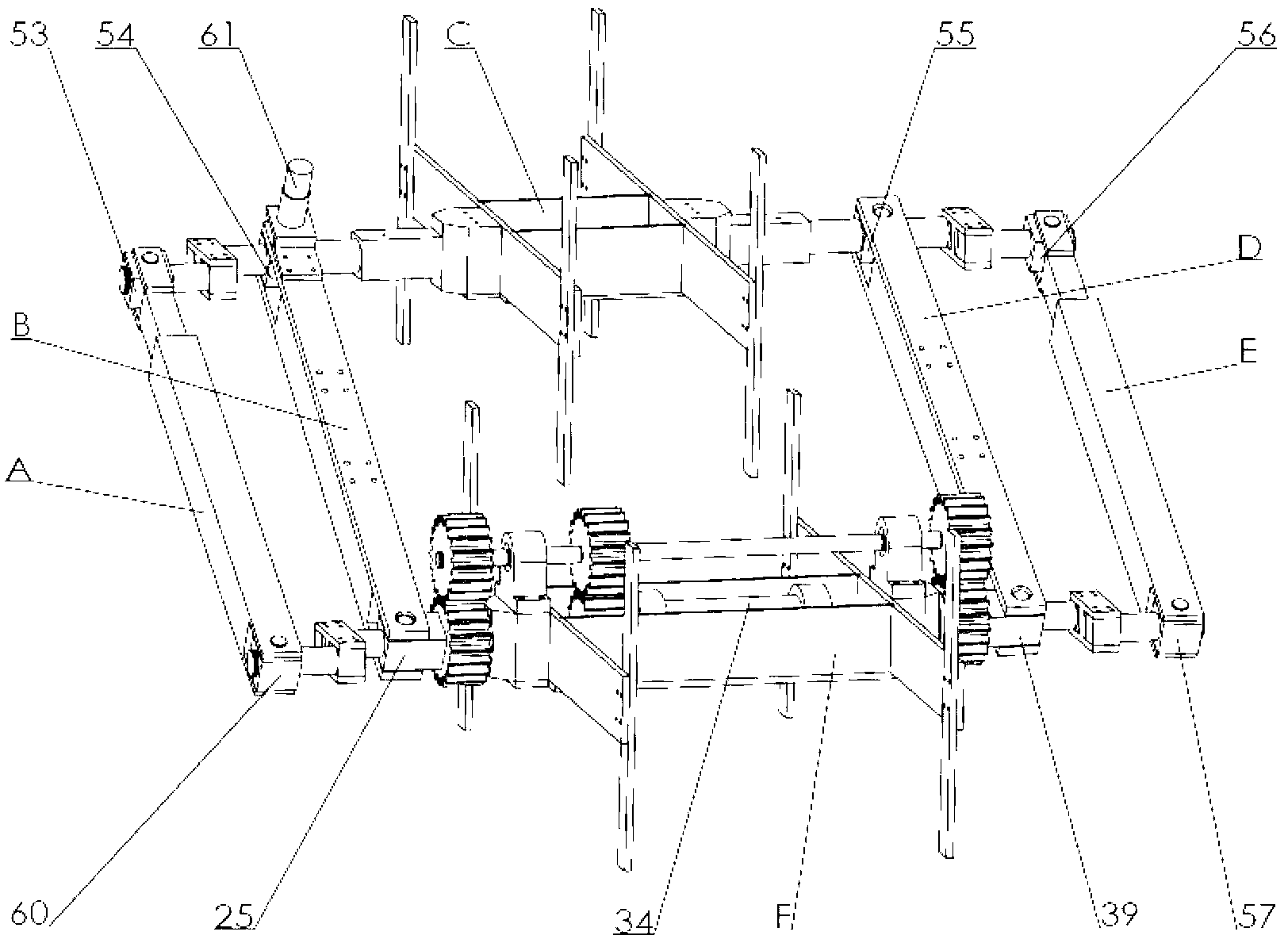
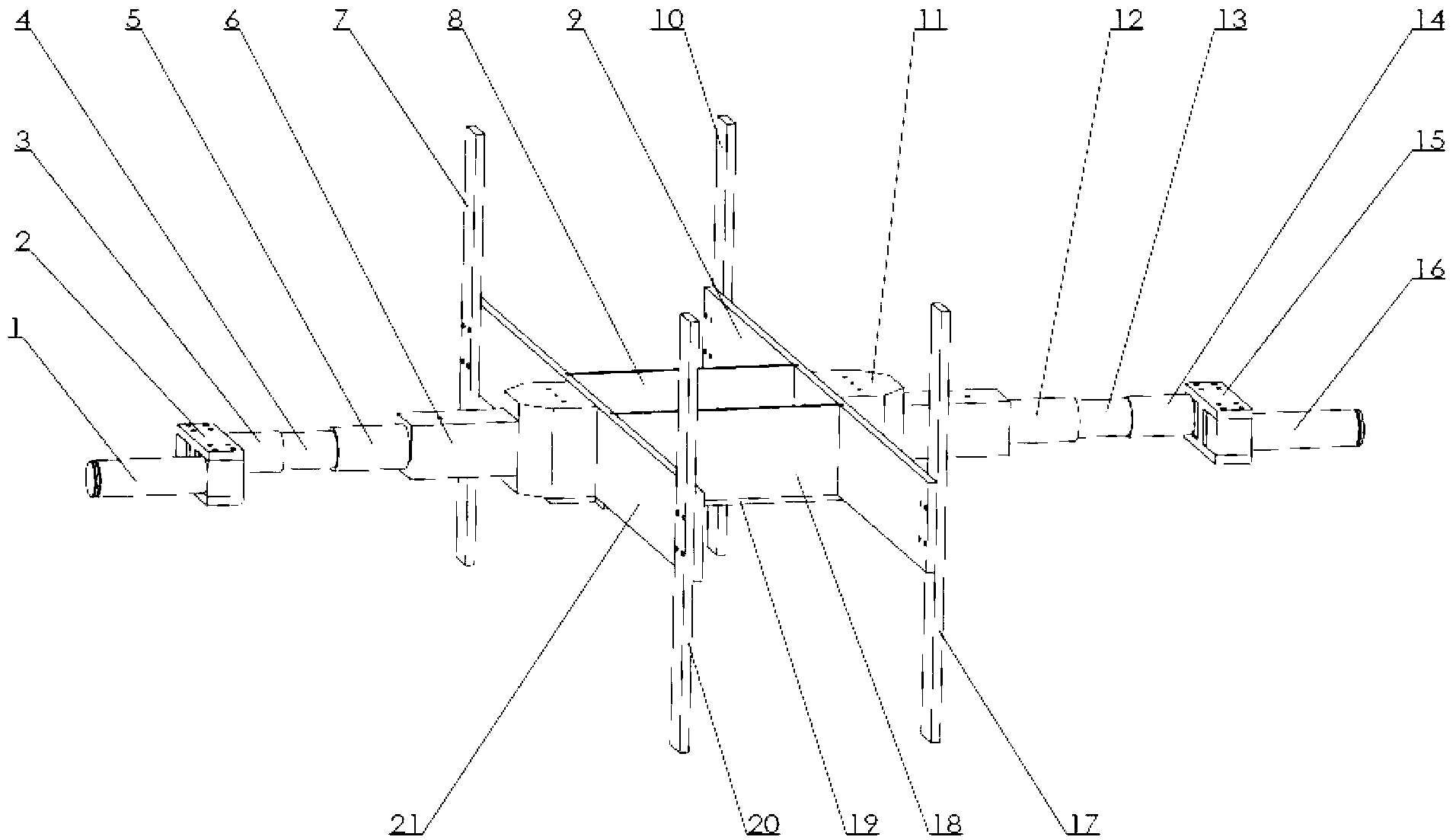
[0022] A biped walking mechanism, such as figure 1 Including: a static platform (C), a dynamic platform (F), two connecting rods (B), (D), two push rods (A), (E), two motors (34, 61), eight Universal joints (G, H, I, J, K, L, M, N).
[0023] The static platform (C) and the dynamic platform (F) are arranged in parallel, and the connecting rods (B, D) and push rods (A, E) are parallel to each other. A motor (34) parallel to it is arranged inside the moving platform, and the motor (61) is vertically arranged on the shaft sleeve pin at the end of any connecting rod or push rod. The moving platform and the static platform are connected with connecting rods and push rods through universal joints, wherein the positions of the connecting rods and push rods are parallel to each other.
[0024] The static platform (C) is symmetrically arranged on ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More