

Method for warning traffic accidents in real time on basis of videos
A traffic accident and video technology, which is applied in traffic flow detection, instruments, character and pattern recognition, etc., can solve the problems that the results are easily affected by the subjective influence of observers, have poor reliability, and cannot meet the application requirements, and achieve high accuracy , reliable early warning, and easy-to-achieve effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
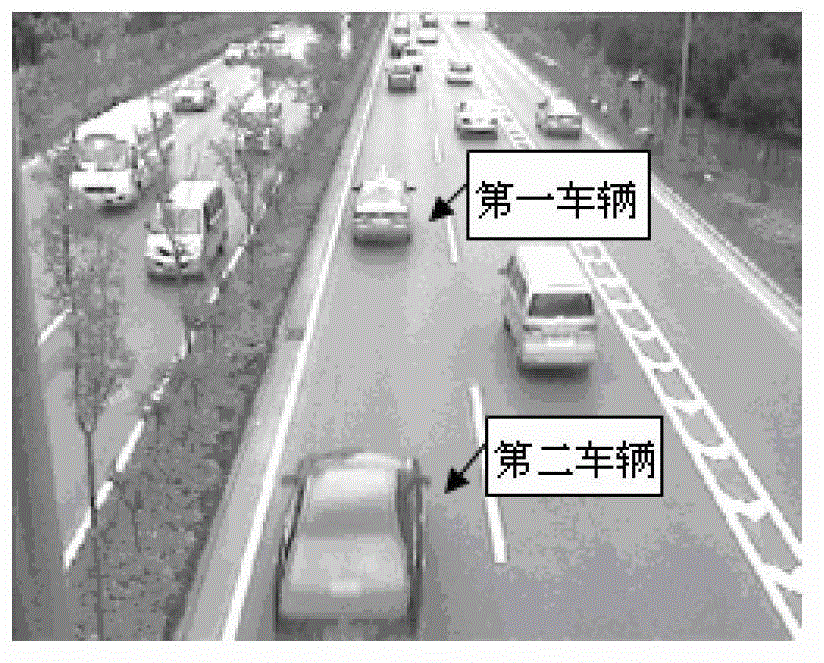
[0057] In the video sequence, two vehicles are selected and numbered, the former vehicle is recorded as the second vehicle, and the latter vehicle is recorded as the first vehicle. From the 10th frame image to the 30th frame image, a stable trajectory line is obtained by detecting and tracking the first vehicle, and a stable trajectory line is obtained by detecting and tracking the second vehicle. In the 30th frame, a corner point on the first vehicle is selected as the target position of the first vehicle by screening, and a corner point on the second vehicle is selected as the target position of the second vehicle. According to the mapping table, S1=983 meters, S2=1003 meters, and the actual distance between the two vehicles is 20 meters. In the 10th frame, select a corner point on the first vehicle as the target position of the first vehicle through screening, select a corner point on the second vehicle as the target position of the second vehicle, and obtain S3=959 meters ...
Embodiment 2
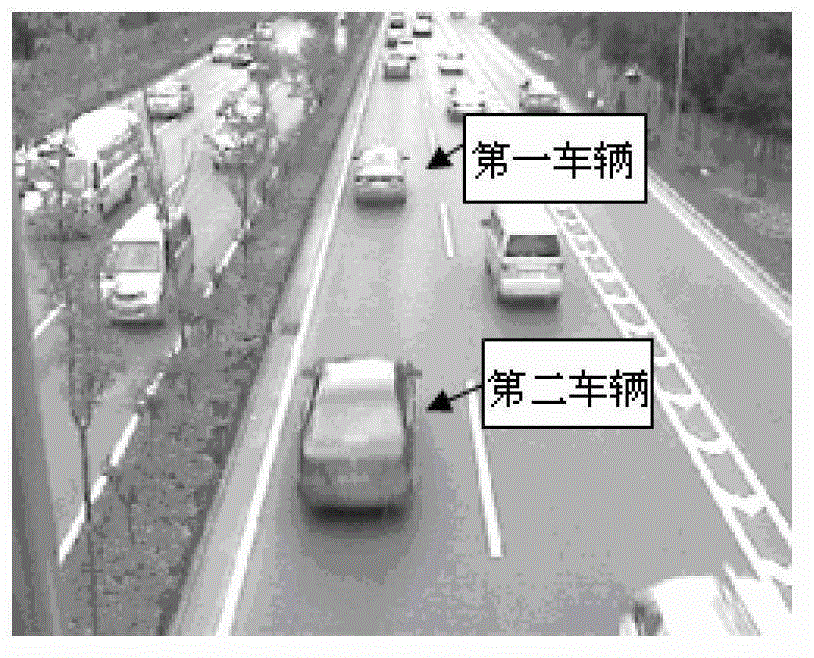
[0059] In the video sequence, two vehicles are selected and numbered, the former vehicle is recorded as the second vehicle, and the latter vehicle is recorded as the first vehicle. From the 10th frame image to the 30th frame image, a stable trajectory line is obtained by detecting and tracking the first vehicle, and a stable trajectory line is obtained by detecting and tracking the second vehicle. In the 30th frame, a corner point on the first vehicle is selected as the target position of the first vehicle by screening, and a corner point on the second vehicle is selected as the target position of the second vehicle. Get S according to the mapping table 1 = 900 meters, S 2 =940 meters, the actual distance between the two vehicles is 40 meters. In the tenth frame, a corner point on the first vehicle is selected as the target position of the first vehicle through screening, and a corner point on the second vehicle is selected as the target position of the second vehicle. Get ...
Embodiment 3
[0061] In the video sequence, two vehicles are selected and numbered, the former vehicle is recorded as the second vehicle, and the latter vehicle is recorded as the first vehicle. From the 10th frame image to the 20th frame image, a stable trajectory line is obtained by detecting and tracking the first vehicle, and a stable trajectory line is obtained by detecting and tracking the second vehicle. In the 20th frame, a corner point on the first vehicle is selected as the target position of the first vehicle by screening, and a corner point on the second vehicle is selected as the target position of the second vehicle. Get S according to the mapping table 1 = 750 meters, S 2 =800 meters, the actual distance between the two vehicles is 50 meters. In the 10th frame, a corner point on the first vehicle is selected as the target position of the first vehicle through screening, and a corner point on the second vehicle is selected as the target position of the second vehicle. Accord...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More