

Coordinate back calculation method for TDICCD (time delay and integration charge coupled devices) linear array push-sweep sensor
A sensor and coordinate technology, which is applied in the field of aerospace and aerial photogrammetry, can solve the problems that the accuracy of coordinate inverse calculation cannot meet the requirements of use, the fitting accuracy of geometric model M is reduced, and the smoothness of the collinear equation model of linear array sensors is reduced, etc., to achieve Effects that improve geometry quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
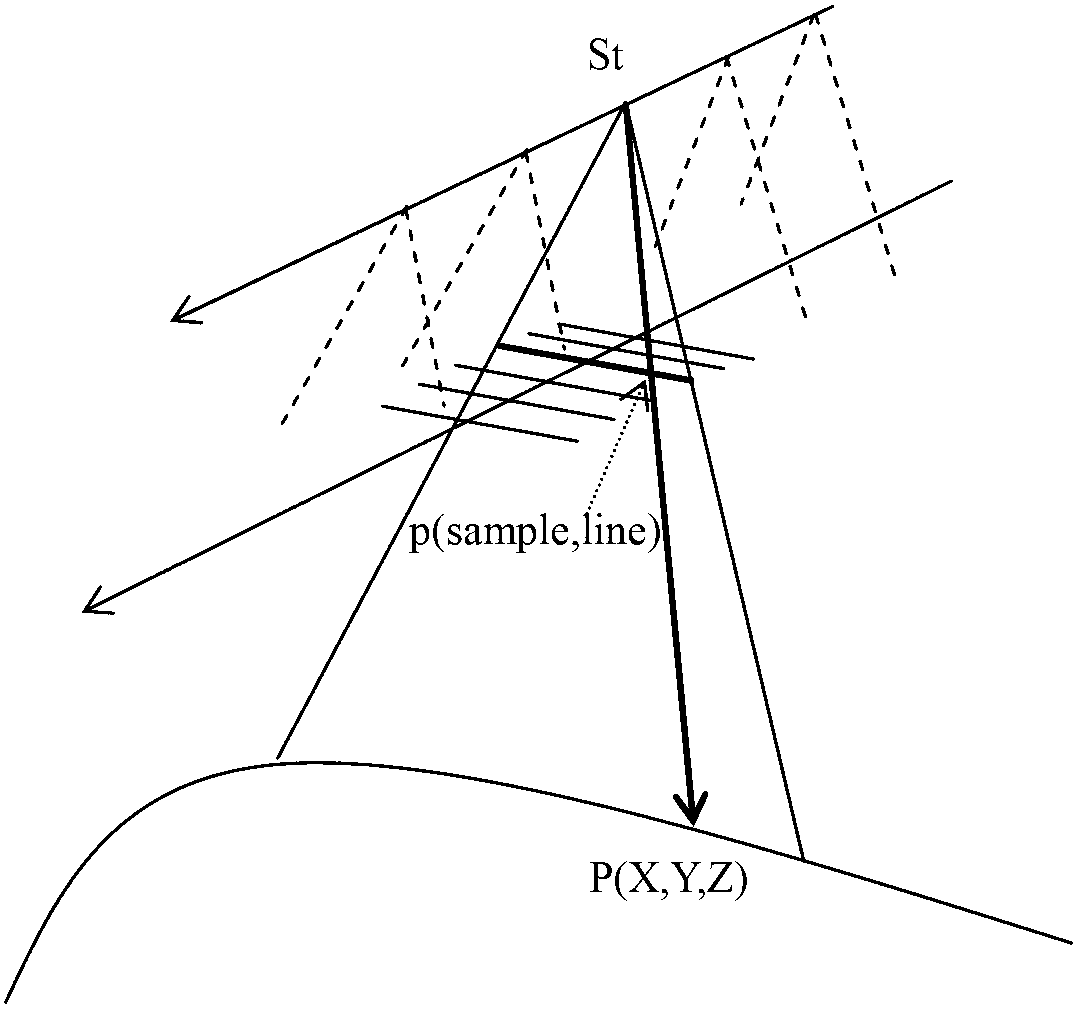
[0028] The present invention proposes a high-precision coordinate inversion method suitable for TDICCD linear array push-broom sensors based on virtual line numbers. The problem to be solved is how to achieve high precision when the line frequency jumps during the TDICCD linear array push-broom imaging process Image coordinate inverse calculation, and at the same time eliminate the problems of inaccurate initial value, too many iterations and iteration non-convergence in the iterative process of coordinate inverse calculation.
[0029] The technical solution of the present invention will be described in detail below in conjunction with the drawings and embodiments.
[0030] The embodiment aims at the TDICCD original image with jumping line frequency, and computer software technology can be used to realize the automatic operation process.
[0031] The present invention firstly describes the specific implementation of each step.
[0032] (1) Create a virtual image to realize th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More