A pipe inspection robot
A robot and gripper technology, applied in the field of robots, can solve the problems of immature robot structure and motion planning, complex structure, low detection efficiency, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
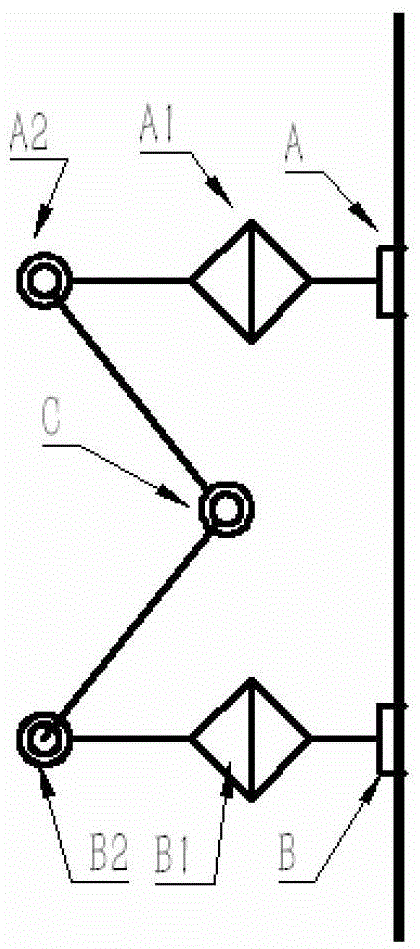
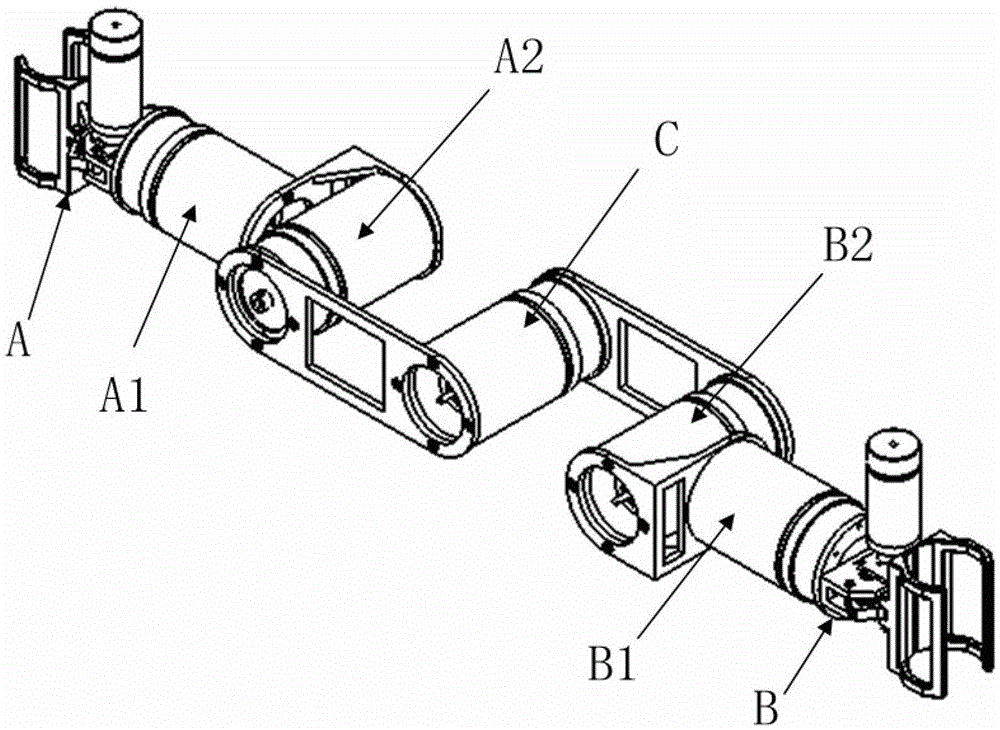
[0049] In terms of overall structural design, the present invention provides a modular two-hand claw climbing robot, such as figure 1 and figure 2 As shown, the robot adopts a modular structure. The pipe inspection robot adopts five rotational degrees of freedom and two grippers. There are two types of seven modules in total. Each module is connected in series, and the order is as follows: the first gripper A -First Rotation Module A1-Second Rotation Module A2-Third Rotation Module C-Fourth Rotation Module B2-Fifth Rotation Module B1-Second Holder B, detection probes can be installed on the two holders, the first One holder A coincides with the axis of the first rotation module A1, the second holder B coincides with the axis of the fifth rotation module B1, and the axis of the second rotation module A2, the third rotation module C, and the fourth rotation module B2 In parallel, the axes of the first rotating module A1 and the fifth rotating module B1 are perpendicular to the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com