

A robot clamping module
A technology of robots and grippers, which is applied in the field of robot gripping modules, can solve the problems of difficult installation and disassembly, bulkiness, and insufficient realization of robot configuration flexibility and quickness, so as to reduce damage to motors and build And the effect of simple disassembly and assembly, easy to expand and apply
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
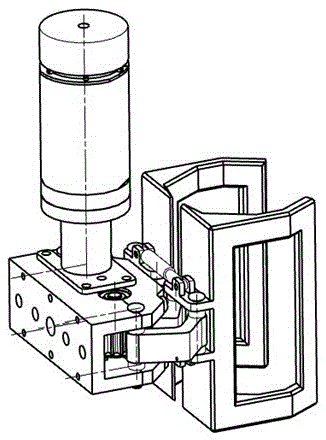
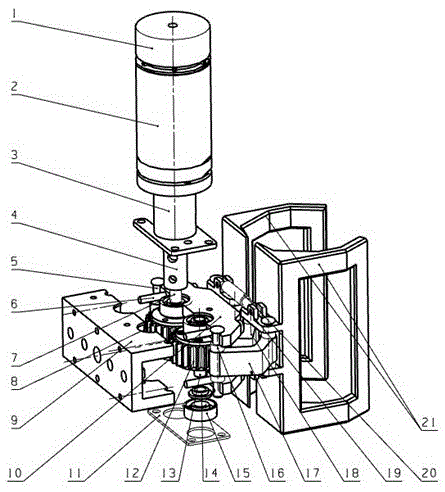
[0021] In the present invention, a robot clamping module is provided. In order to meet the requirements of simple and compact structure, convenient module function expansion, self-clamping and self-locking, multi-module loading and application requirements, the robot clamping module uses a disc motor, The planetary gear reducer, the gripper transmission assembly, the jaw assembly and the locking mechanism realize the movement and gripping functions. The gripper module is driven by a disc motor, and the torque is transmitted to the gear after passing through the planetary reducer. Through the meshing of the two gears, the inner connecting rod fixed on the gear is driven to rotate. The disassembled platform and the gripper form a parallelogram mechanism to realize the clamping and releasing functions of the gripper, and the locking mechanism realizes automatic locking in the gripping state when the gripper is opened or closed.
[0022] In the present invention, the appearance an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More