

Global Calibration Method for Active Binocular Vision System
A technology of binocular vision system and calibration method, applied in the field of global calibration of active binocular vision system, can solve problems such as poor stability and slow speed, achieve improved stability and speed, high global calibration accuracy, and overcome differences in global calibration results Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
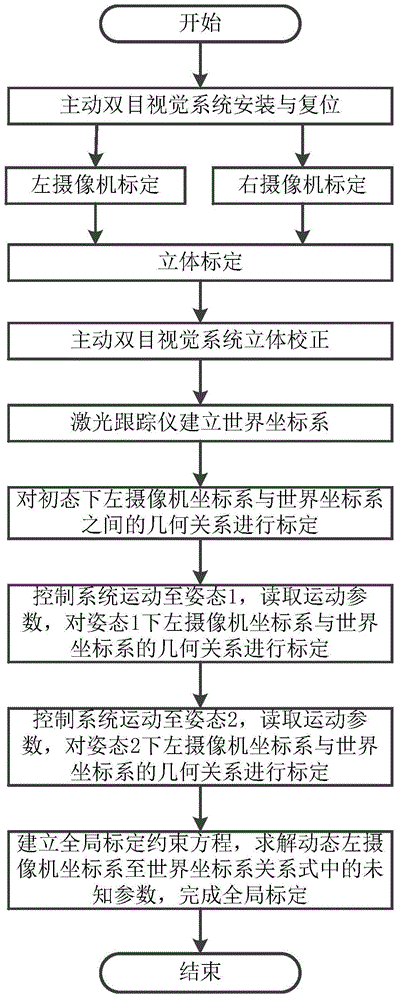
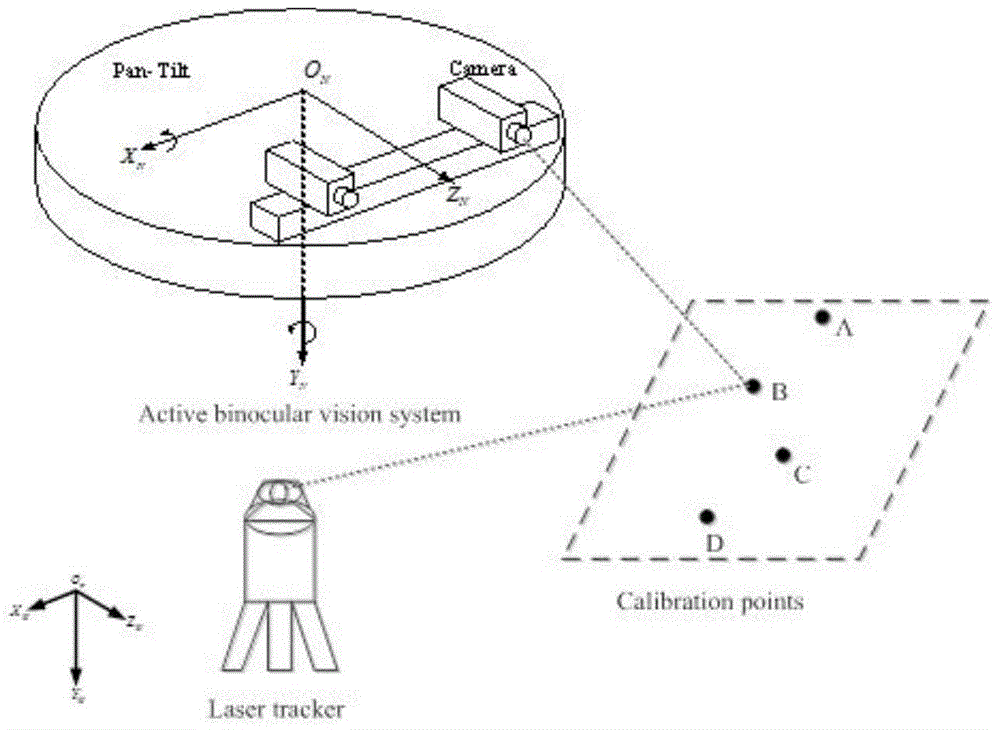
[0024] Such as figure 1 As shown, the process of the method of the present invention is to first install the active binocular vision system and adjust the parameters, and then perform camera calibration and stereo calibration to realize the stereo correction of the system. Then use the laser tracker to determine the world coordinate system, and derive the relationship between the dynamic left camera coordinate system and the world coordinate system, and clarify the calibration parameters. Then make the system move from the initial state to posture 1 and posture 2, and calibrate the geometric relationship between the left camera coordinate system and the world coordinate system in each posture. Finally, the global calibration constraint equation is established to solve the unknown parameters, and the global calibration is completed.
[0025] The specific steps of using the present invention to carry out the global calibration of the active binocular vision system are as follow...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More