Obstacle-crossing carrying robot
A robot and obstacle-crossing technology, applied in the field of robotics, can solve problems affecting the stability of vehicles, and achieve the effect of improving obstacle-crossing ability and high obstacle-crossing performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The technical solutions of the present invention will be described in detail below with reference to the accompanying drawings and embodiments.
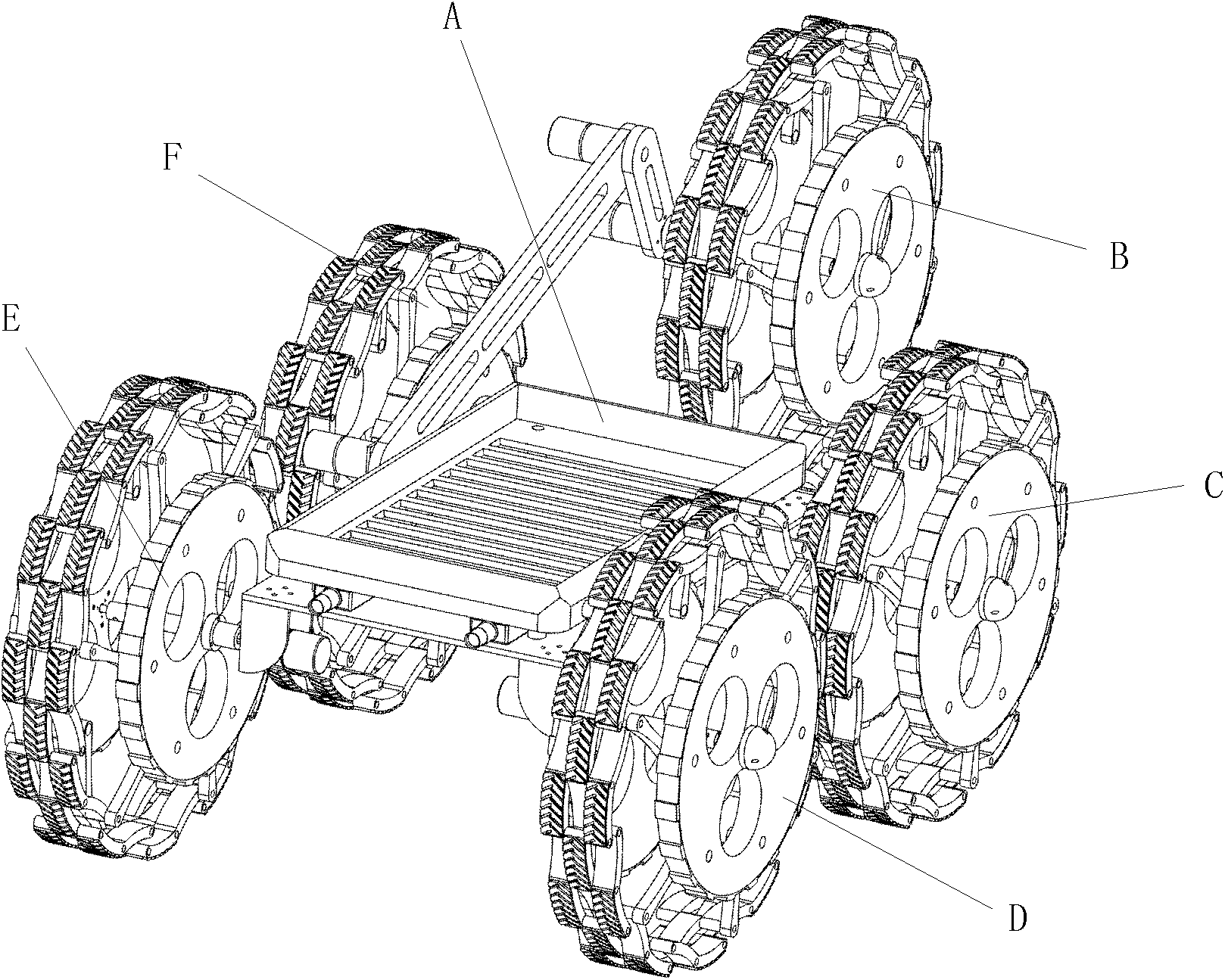
[0028] like figure 1 As shown, an obstacle-surmounting carrier robot includes a vehicle body A and first to fifth obstacle-surmounting wheels B, C, D, E, F arranged on the vehicle body A. The first to fifth obstacle surmounting wheels B, C, D, E, F are exactly the same, the first obstacle surmounting wheel B is installed on the second robotic arm A-f, the second to fifth obstacle surmounting wheels C, D, E, F Mounted at the four vertices of chassis A-d. The first to fifth obstacle-surmounting wheels B, C, D, E, F are realized by the independent drive system inside the wheel to realize the deformation of the outer contour of the wheel and the running, backward and differential steering of the robot. The vehicle body A is provided with first and second robotic arms A-e, A-f, and the first and second robotic arms A-e, A-f are d...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap