

Method and system for controlling crane hoisting relative to boom follow-up
A crane and jib technology, which is applied in the field of controlling the relative movement of the hoist of the crane to the jib, can solve the problems of low work efficiency, high requirements on the operating quality of the operator, and inability to effectively prevent hoisting accidents, so as to avoid hoisting accidents, avoid hoisting accidents, and avoid hoisting accidents. good control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. For ease of understanding and concise description, the following describes the method and system of the follow-up control, and the beneficial effects will not be discussed again.
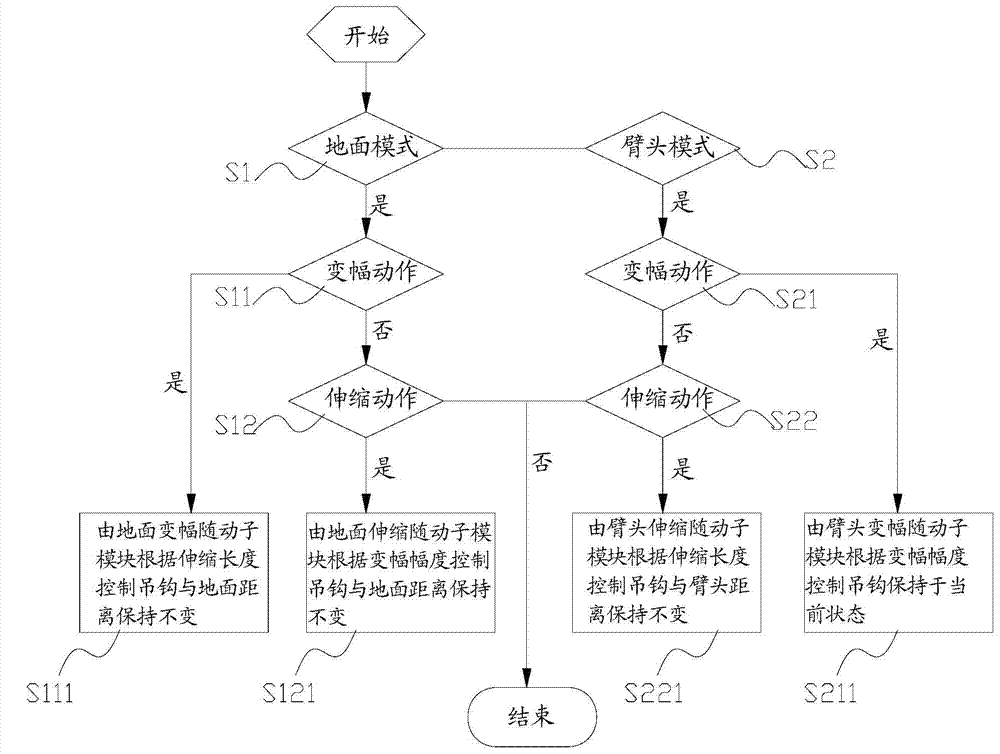
[0055] Please refer to figure 1 , figure 1 It is a flow chart of a specific embodiment of the method for controlling the hoisting of a crane relative to the boom follow-up provided by the present invention.
[0056]The method for controlling the hoisting of the crane relative to the boom follow-up specifically includes the following steps:
[0057] S1, judging whether it is ground mode;
[0058] If yes, enter step S11; if no, enter step S2;
[0059] S2, judging whether it is the arm head mode;
[0060] If yes, enter step S21;
[0061] If no...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More