Forward-looking sonar-based underwater robot collision avoidance method
An underwater robot, forward-looking sonar technology, applied in two-dimensional position/channel control and other directions, can solve problems such as the existence of blind spots, and achieve the effect of improving survivability and reducing collision avoidance blind spots.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
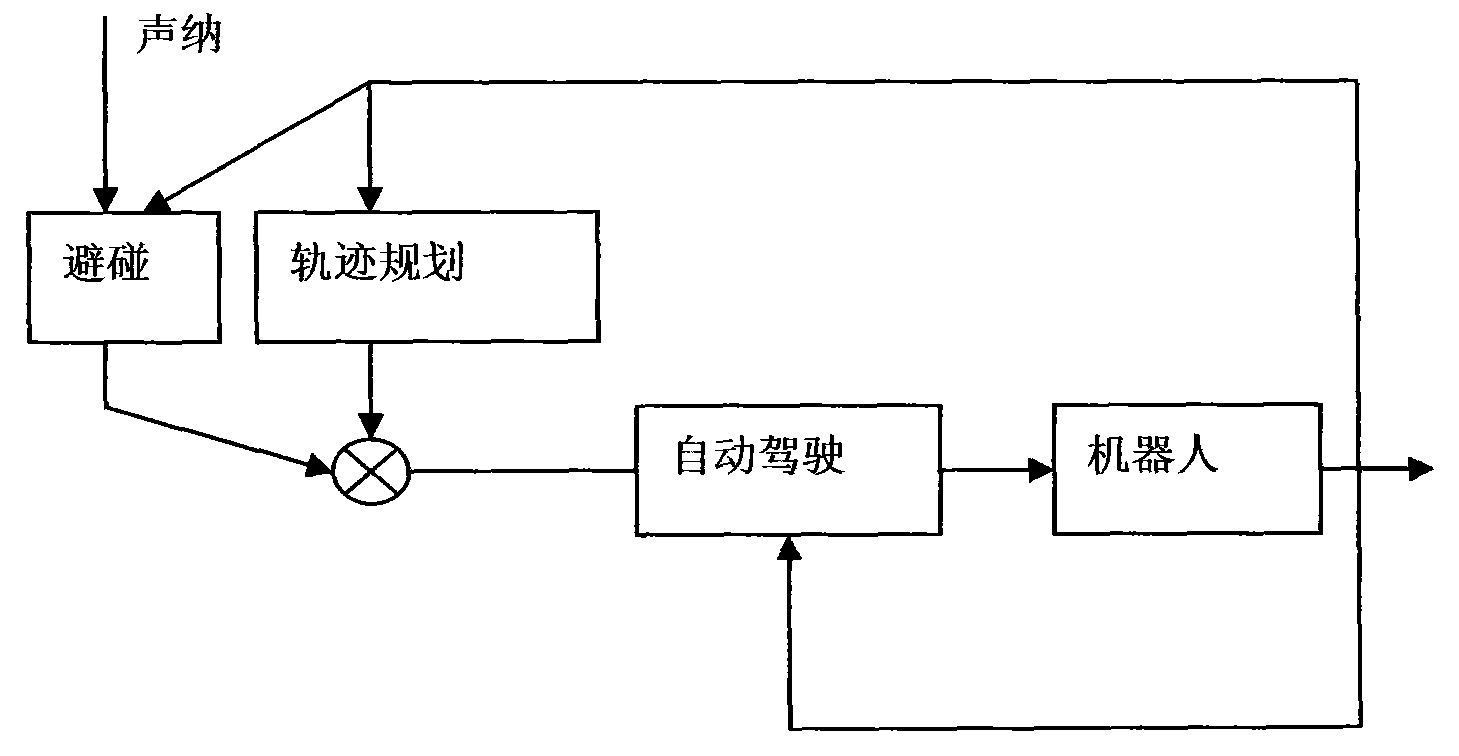
[0032] Such as figure 1 Shown, a kind of underwater robot collision avoidance method based on forward-looking sonar comprises underwater robot, and underwater robot is provided with because of forward-looking sonar, position and attitude sensor, control device and actuator; The data measured by the nanohe pose sensor implements the collision avoidance control strategy, adjusts the control amount of the actuator, and then adjusts the pose of the underwater robot to avoid obstacles.
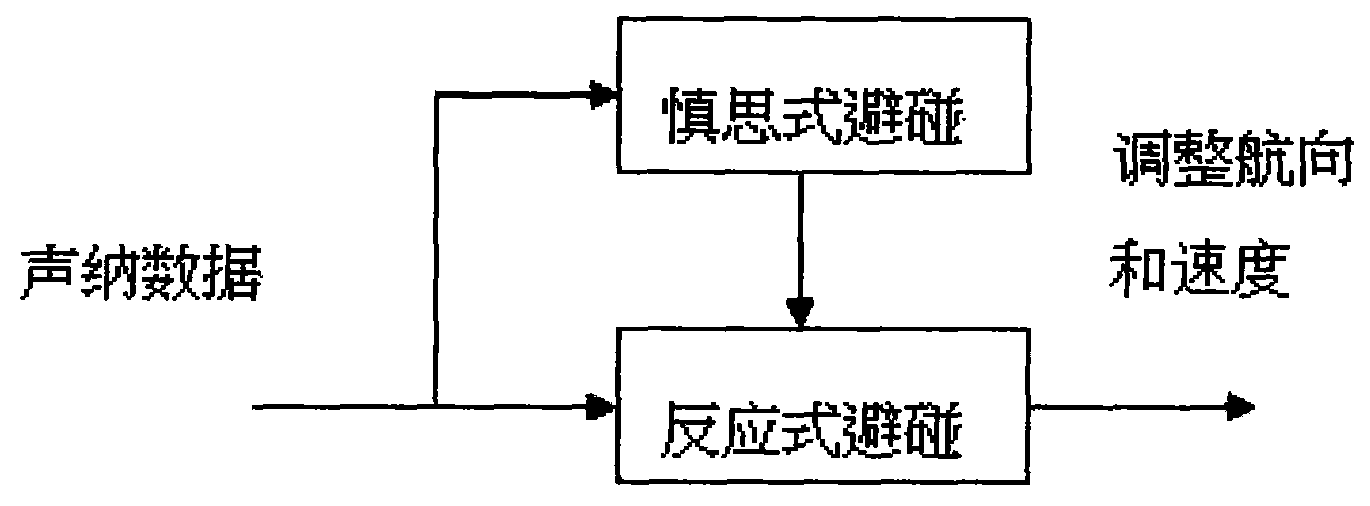
[0033] The collision avoidance control strategy is divided into two types: reactive collision avoidance and deliberate collision avoidance. The control device adjusts the course and speed through the combination of these two collision avoidance methods. Reactive collision avoidance is a low-level intelligent behavior that does not require complex theoretical derivation and is fast. Deliberative collision avoidance is a high-level intelligent behavior that requires a complex analysis process and is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com