Crane control method, controller, and control device
A control method and control device technology, applied to cranes, transportation and packaging, load hanging components, etc., to achieve the effect of improving convenience and increasing the operable range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be described in detail below with reference to the accompanying drawings and examples.
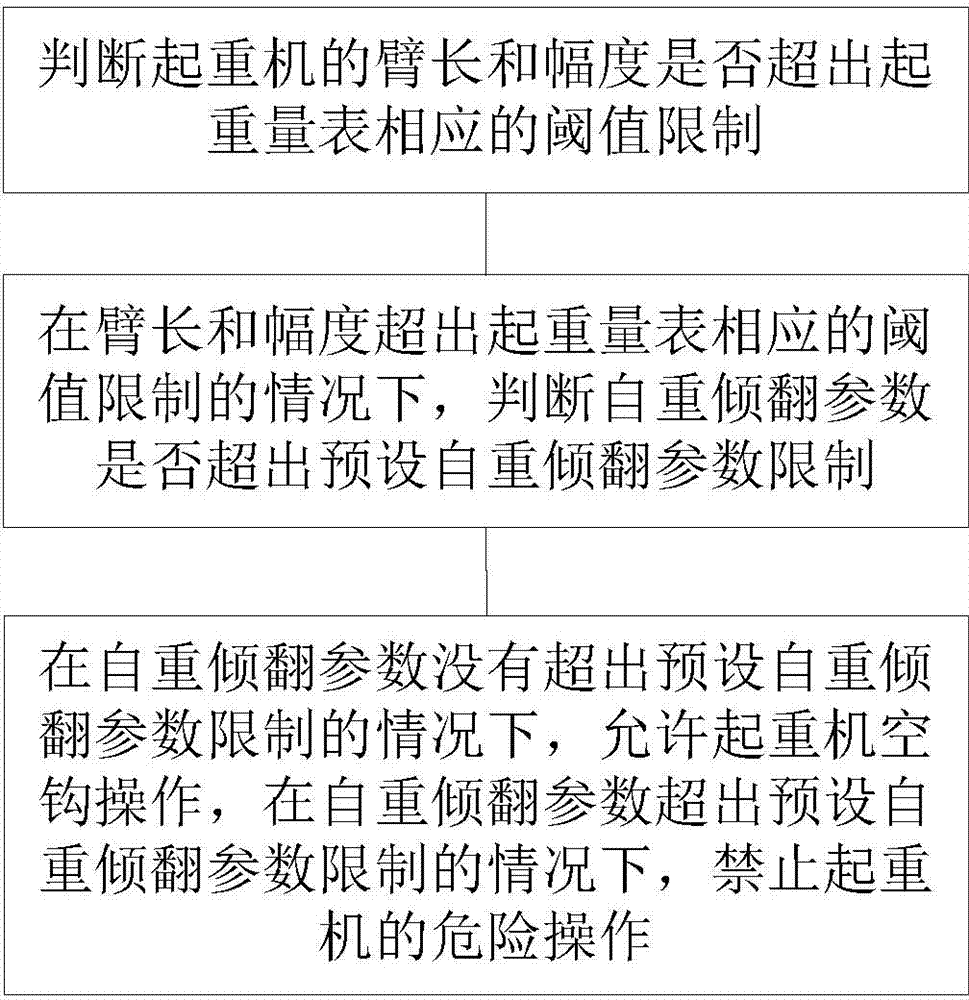
[0021] Such as figure 2 As shown, the crane control method according to the present invention includes the following steps: a first judging step: judging whether the arm length and amplitude of the crane exceed the corresponding threshold limit of the lifting capacity table; second judging step: when the arm length and amplitude exceed the lifting capacity In the case of the corresponding threshold limit in the table, judge whether the self-weight tipping parameter exceeds the preset self-weight tipping parameter limit; control step: when the self-weight tipping parameter does not exceed the preset self-weight tipping parameter limit, allow the crane to operate with an empty hook , when the self-weight tipping parameter exceeds the preset self-weight tipping parameter limit, the dangerous operation of the crane is prohibited; wherein, the dangerous operat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More