

A UAV autonomous navigation and positioning method based on multi-model distributed filtering
A technology of autonomous navigation and positioning method, applied in satellite radio beacon positioning system, navigation, surveying and mapping and navigation, etc., can solve the problems of airborne equipment damage, failure to provide, high computational complexity, etc., and achieve reliable navigation and positioning information Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] Below in conjunction with accompanying drawing and specific embodiment, the present invention is further described, and the specific implementation steps of the present invention are as follows:
[0064] (1) Calibrate and compensate for accelerometers, gyroscopes, magnetic sensors, barometers and cameras;
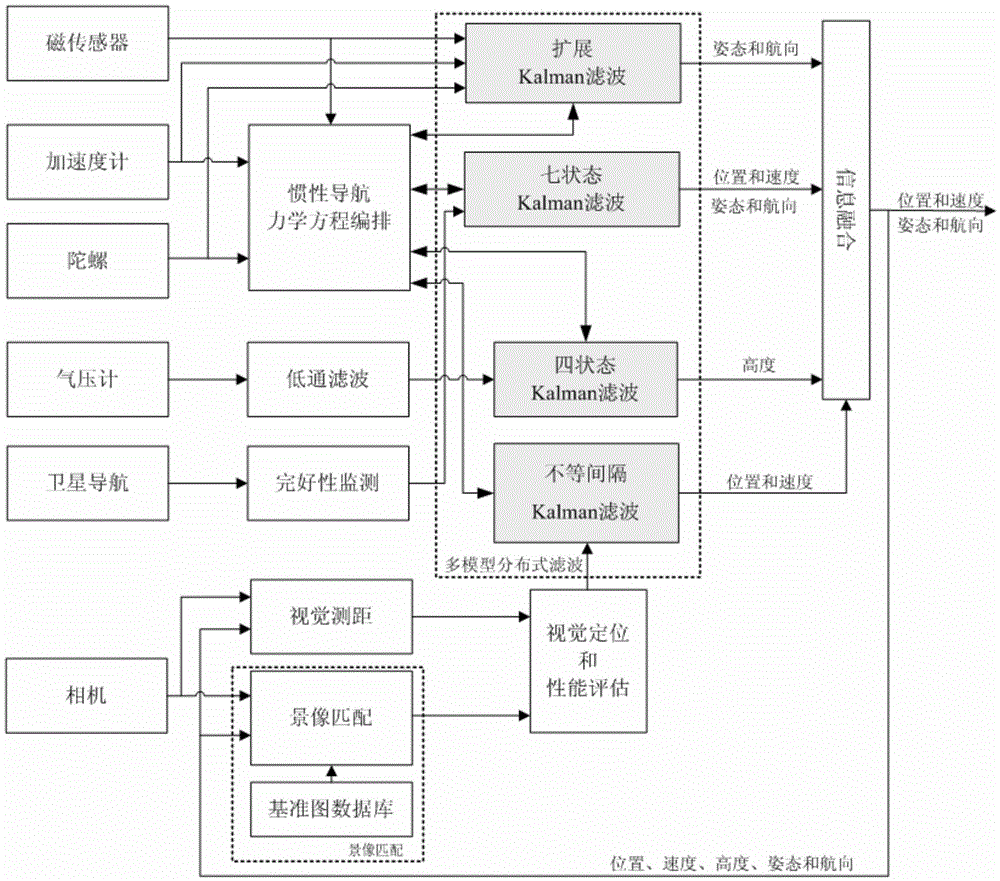
[0065] (2) if figure 1 As shown, according to the layout of the inertial navigation system mechanics equation, the output value of the accelerometer and gyroscope is used to calculate the motion information of the UAV in real time, including position, velocity and attitude;
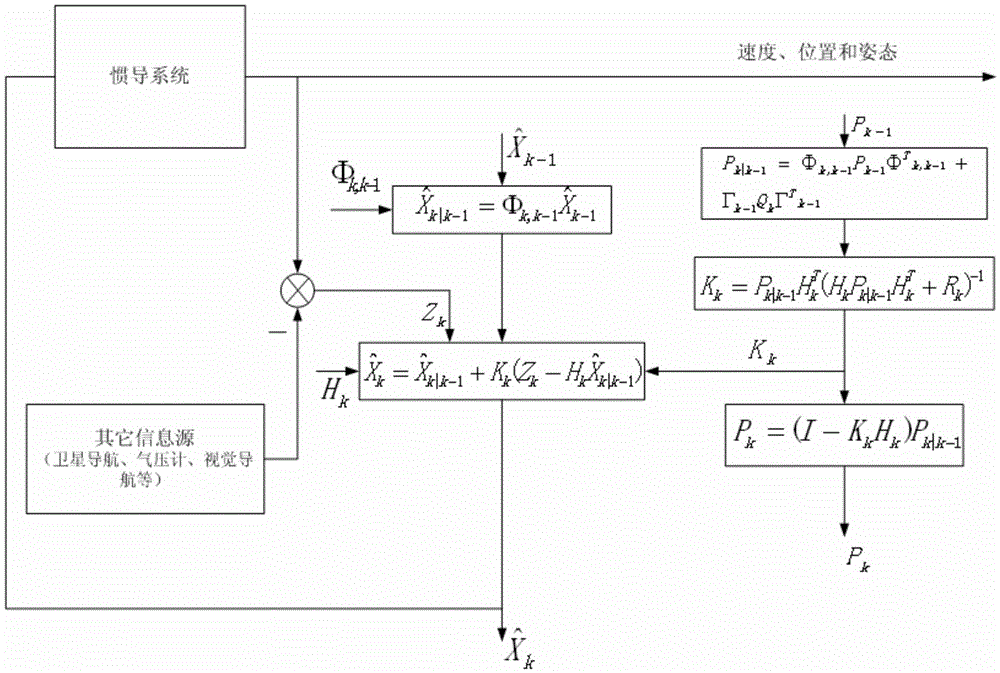
[0066] (3) if figure 1 and 2 As shown, when the satellite navigation system is available, the seven-state feedback Kalman filter is used to process the position and velocity information output by the satellite navigation and positioning system to estimate the horizontal channel and attitude error of the inertial navigation system, so that the inertial navigation system can output accurate posi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More