

Method of implementing real-time bending follow of bending robot
A robot and bending machine technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as inability to follow bending in real time, achieve the effects of improving following accuracy and bending quality, reducing time, and improving debugging efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
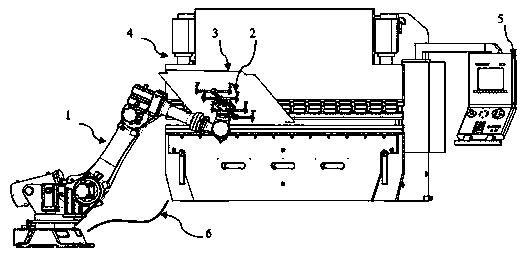
[0024] figure 1 The device for realizing the real-time following method of bending by a bending robot includes a robot 1, a robot gripper 2, a plate 3, a bending machine and a communication cable 6, and the bending machine includes a body 4 and a bending controller 5. Among them, robot 1 is a general-purpose six-joint series industrial robot, which has general-purpose industrial robot functions: the coordinate system includes joint coordinate system, Cartesian coordinate system, tool coordinate system and external coordinate system, and can establish and set the external coordinate system. It can use the four-point method to establish the tool coordinate system, and has the characteristic of keeping the position and posture unchanged under the current coordinate system during normal operation, and can manually and automatically contro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More