

Multi-replication routing method for selecting eruption range in vehicular vdhoc networks
A vehicle-mounted self-organizing, multi-copy technology, applied in data exchange networks, digital transmission systems, electrical components, etc., can solve the problems that are not conducive to the rapid and effective delivery of messages, achieve high reliability and other performance, and improve the delivery rate. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030]The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
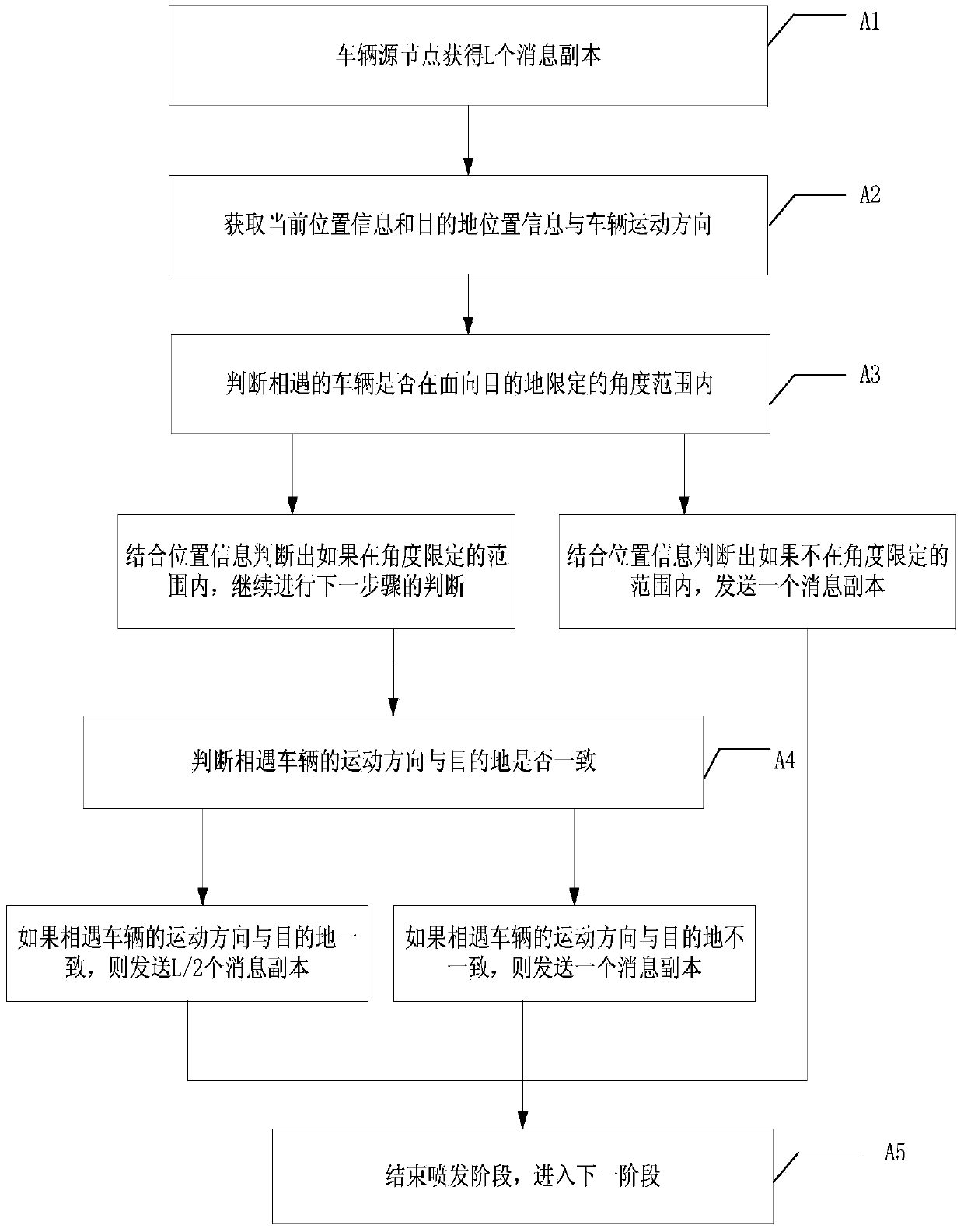
[0031] figure 1 It is a flowchart of the selective injection stage in the routing method of the present invention. As shown in the figure, in the present invention, the specific process of injection may include:
[0032] Step A1, the vehicle source node obtains L message copies.
[0033] Specifically, the value of L is usually determined according to the scale of the network, and the obtained value of L is generally much smaller than the number M of nodes in the network.
[0034] Step A2, obtaining the current location information, the target location information and the moving direction of the vehicle.
[0035] Specifically, all moving vehicles are equipped with a GPS system, so the information can be obtained more conveniently, and the vehicle keeps a neighbor list recording node information within a hop range.
[0036] Step A3, judgin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More