

Method for compensating gravity of nine-accelerometer gyro-free inertial navigation system
An accelerometer and inertial navigation system technology, applied in the field of inertial navigation, can solve the problems of affecting the output of the accelerometer, increasing the system error, and distinguishing between gravity and inertial force, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be further described below in conjunction with the accompanying drawings.
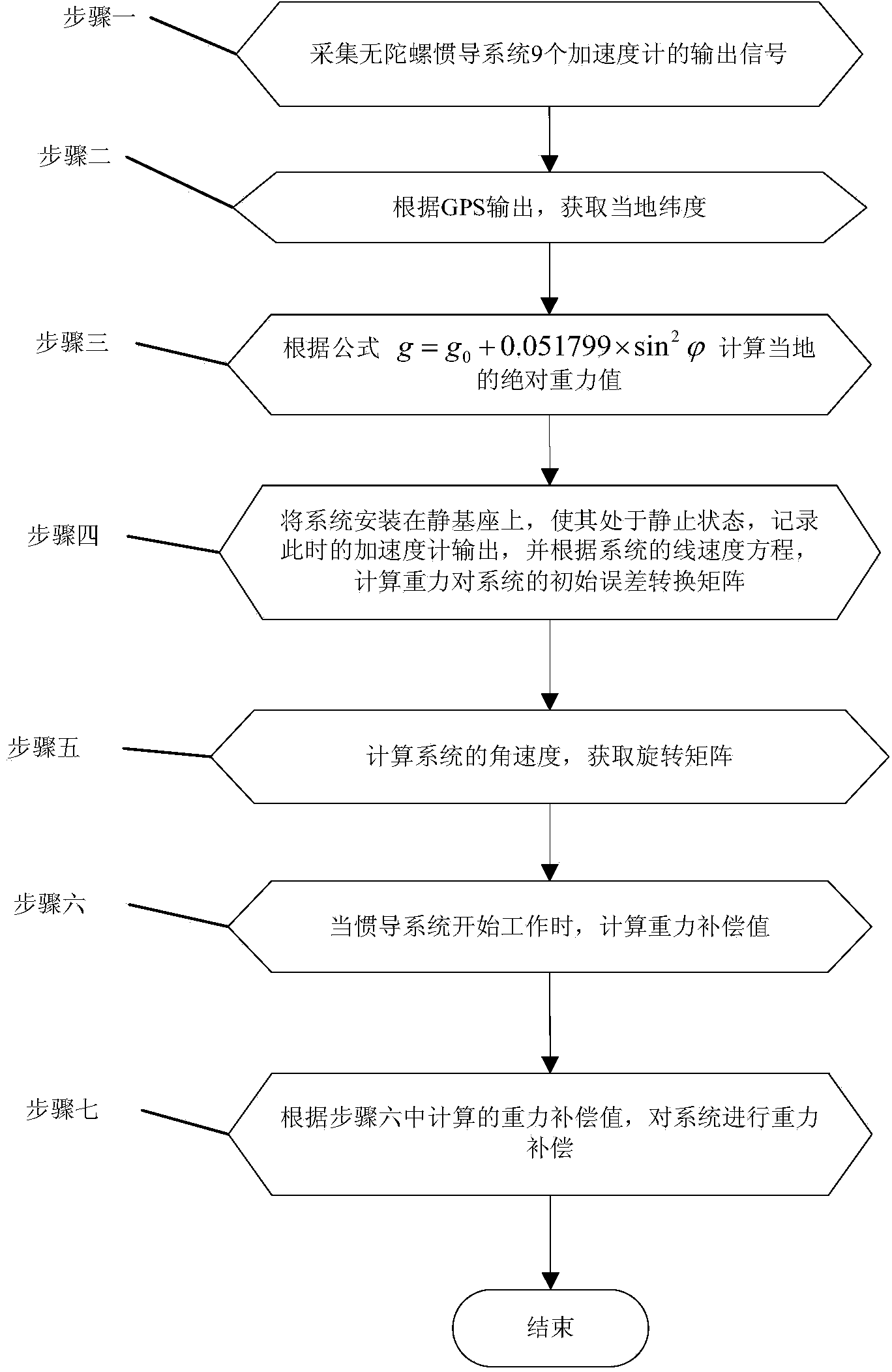
[0055] The present invention comprises the following steps:
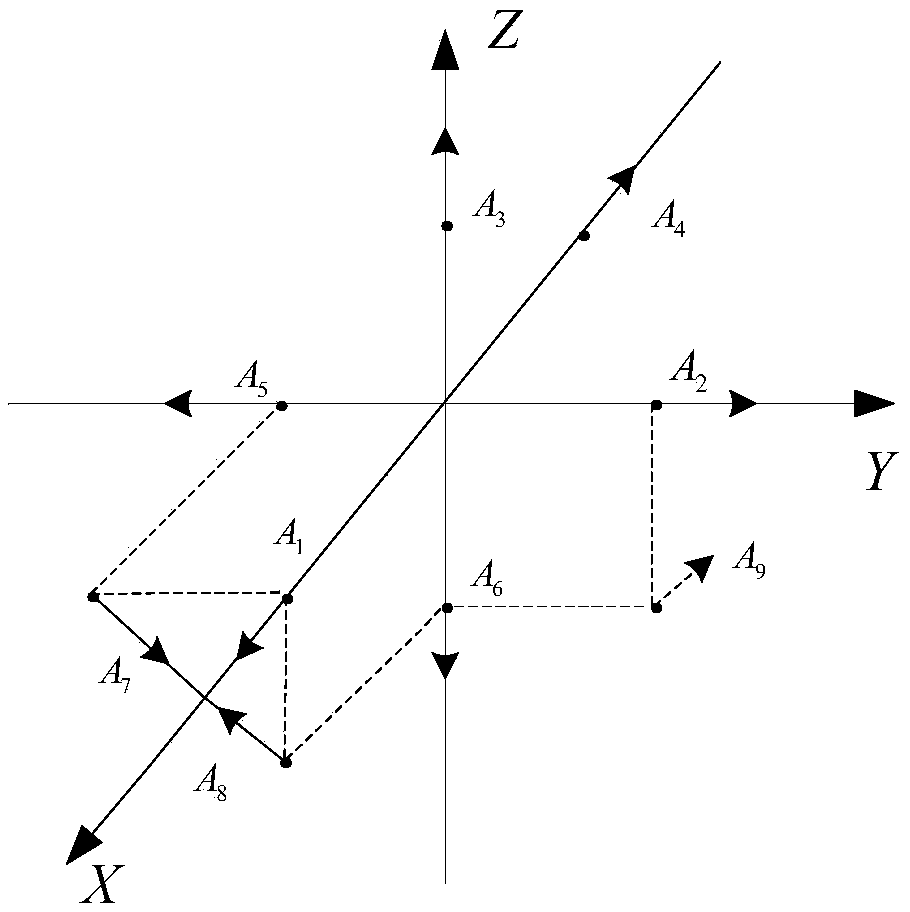
[0056] Step 1, collecting the output signals of 9 accelerometers of the gyro-free inertial navigation system;
[0057] Step 2. Obtain the local latitude according to the GPS output
[0058] Step 3. Calculate the local absolute gravity value according to the following formula
[0059]
[0060] Among them, g 0 =9.78049, is the local latitude.
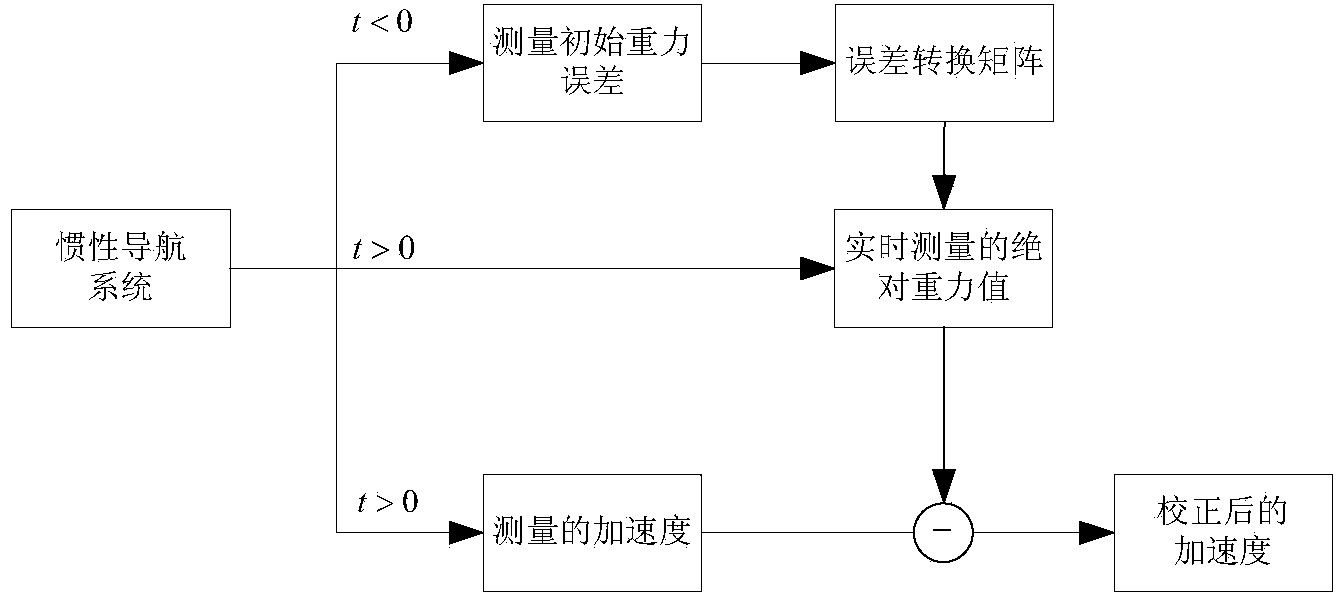
[0061] Step 4. Install the system on a static base to make it in a static state, and the accelerometer can only be sensitive to gravity. Record the output of the accelerometer at this time, and calculate the initial error conversion matrix F of the gravity to the system according to the linear velocity equation of the system.
[0062] Step 5. Calculate the angular velocity ω of the system x ,ω y ,ω z , get the rotation matrix
[0063] Ω ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More