

Functional modeling method for indoor scene
A technology for indoor scenes and modeling methods, applied in 3D modeling, image data processing, instruments, etc., can solve problems such as difficulty in obtaining 3D models, failure to achieve functional scene reconstruction, and inability to reconstruct the interior of objects, so as to improve the interactive experience. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
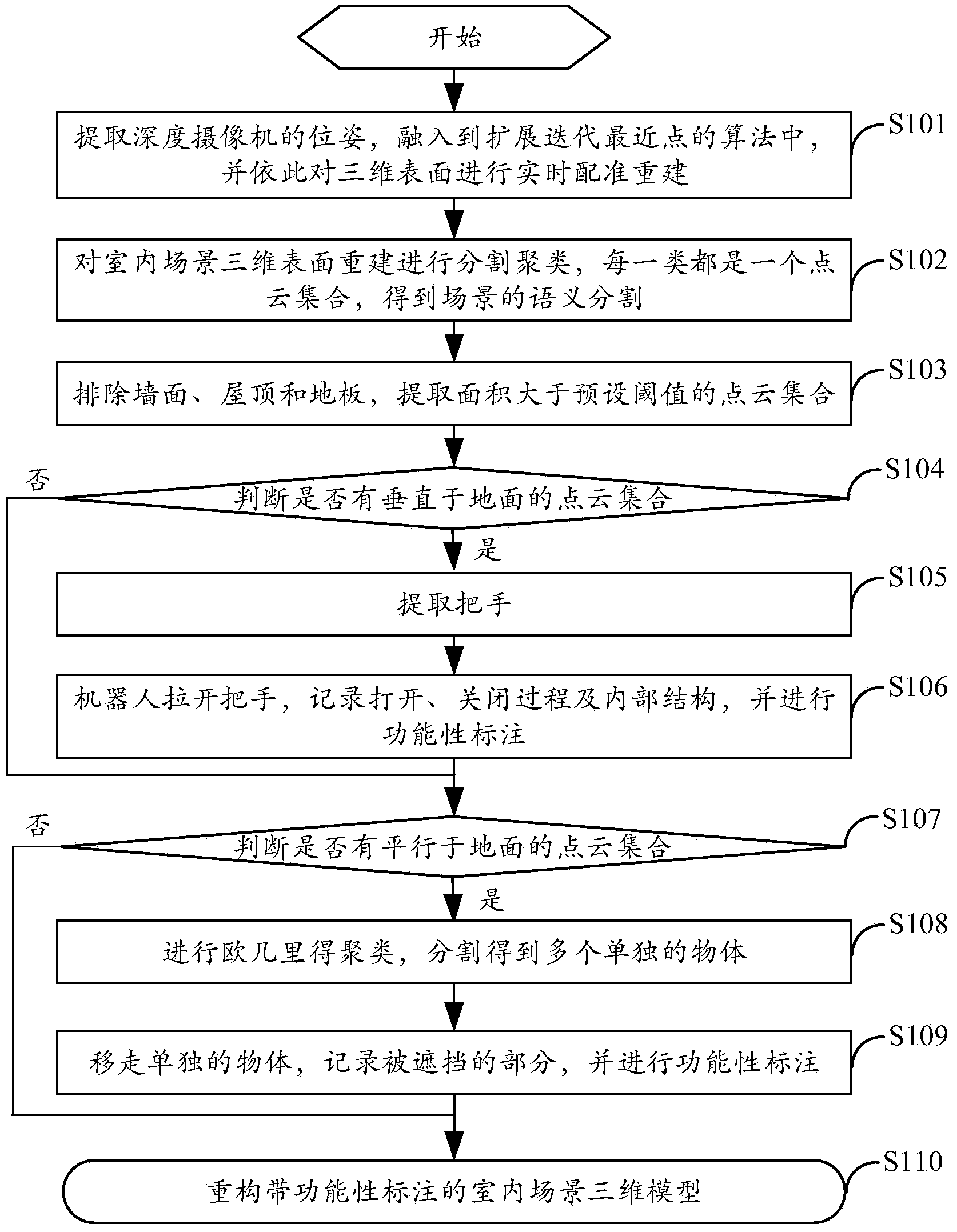
[0021] see figure 1 , which is a schematic flowchart of the method for functional modeling of indoor scenes in the present invention.
[0022] In step S101, the robot and the depth camera are first used for 3D surface reconstruction, that is, the pose of the depth camera is extracted, incorporated into the algorithm of the extended iterative closest point, and real-time registration and reconstruction of the 3D surface is carried out accordingly.
[0023] Specifically, in this step, the core is that we integrate the pose change information of the depth camera into the extended iterative closest point (ICP) algorithm, and use this method to perform real-time registration and reconstruction of the 3D surface. The ICP algorithm is widely used in the registration of 3D point cloud data and registration based on free-form surfaces. The core of the ICP algorithm is to transform the data registration problem into an exact solution problem that minimizes the distance function between...
Embodiment 2
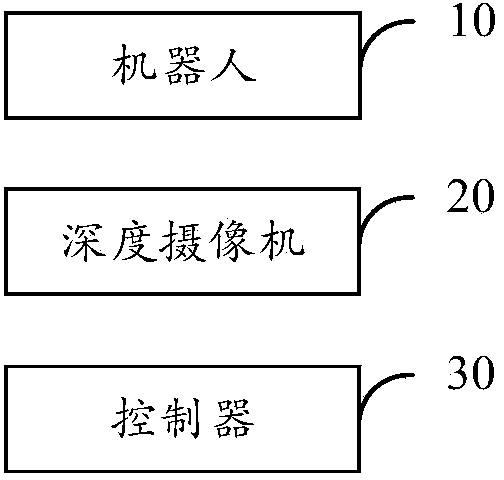
[0053] see figure 2 , is a schematic structural diagram of the functional modeling system of the indoor scene in the present invention.
[0054] The system for functional reconstruction of the indoor scene is mainly composed of a dual-arm mobile robot 10 and a depth camera 20 .
[0055] The dual-arm mobile robot 10 has two arms with 7 degrees of freedom and each is equipped with a two-finger gripper. Its chassis is an omnidirectional mobile platform that can move freely in an indoor environment. In order for the robot 10 to firmly grasp the depth camera 20, we used a 3D printer to design and manufacture a connecting piece that is compatible with the base of the depth camera and is easy to be held by the gripper of the robot 10. The depth camera 20 is fixed on this connection. on file.
[0056] Their mutual cooperation relationship is as follows:
[0057] (1) Acquisition of the functional data of the indoor scene, using a dual-arm mobile robot to move the depth camera in th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More