

Double crossed beam combination type finger joint six-dimensional force sensor
A six-dimensional force sensor and combined technology, applied in the field of sensors, can solve problems such as high cost, application limitations, and complex structure, and achieve the effects of low processing cost, obvious deformation, and improved sensitivity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further illustrated below in conjunction with the accompanying drawings and specific embodiments, and it should be understood that these embodiments are only used to illustrate the present invention, and are not intended to limit the scope of the present invention. After reading the present invention, modifications and replacements of various equivalent forms of the present invention by those skilled in the art fall within the scope of protection defined by the claims of the present application.
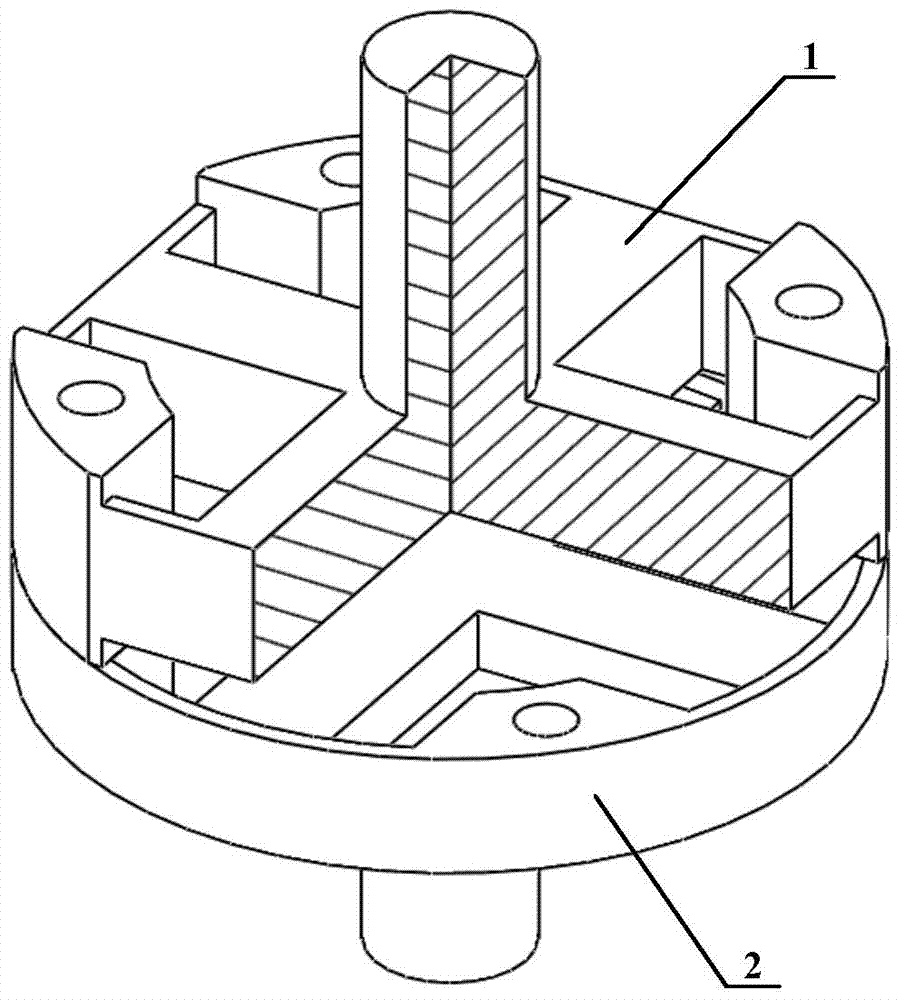
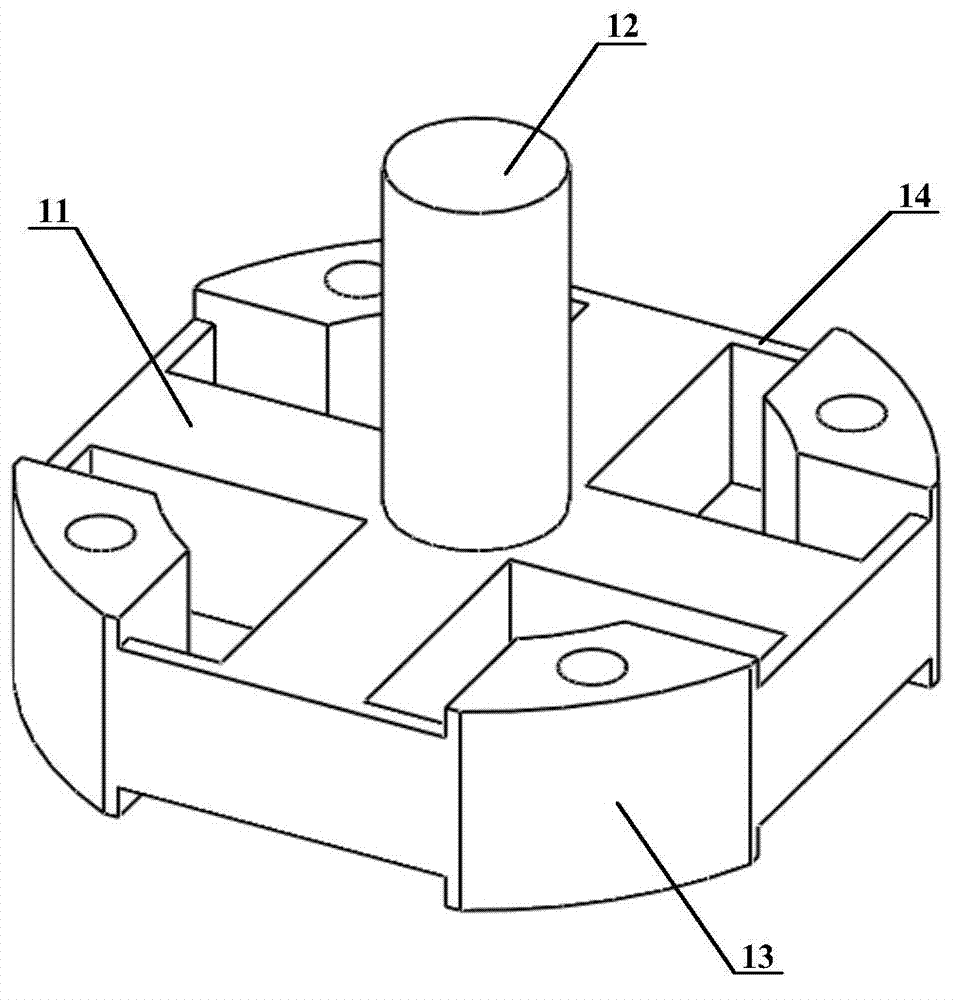
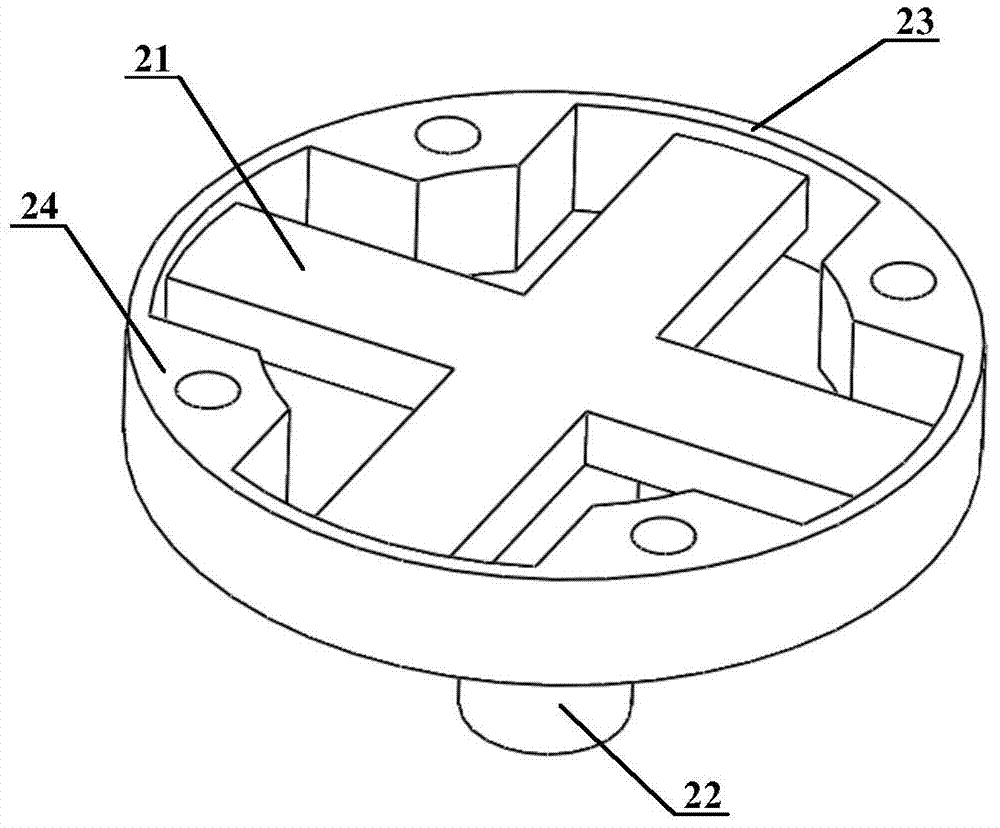
[0027] Such as figure 1 As shown, the double cross-beam combined finger joint six-dimensional force sensor of the present invention includes an upper cross-beam elastic body 1 and a lower cross-beam elastic body 2 , both of which are integral structures. Such as figure 2 As shown, the upper cross beam elastic body 1 includes four upper elastic beams 11 , one upper central loading shaft 12 , four upper fixed platforms 13 and four upper floating b...
PUM
| Property | Measurement | Unit |
|---|---|---|
| diameter | aaaaa | aaaaa |
| height | aaaaa | aaaaa |
| diameter | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More