

Parametrization design method of anti-disturbance composite servo controller
A servo controller, parametric design technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of ADRC closed-loop stability analysis not yet solved, troublesome engineering application, unclear relationship between system performance, etc. problem, to achieve fast and accurate fixed-point tracking, good transient performance and steady-state performance, smooth and accurate servo tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The technical solution of the present invention will be specifically described below in conjunction with the accompanying drawings.
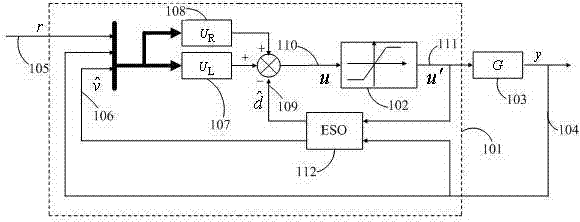
[0038] The present invention is a parametric design method of an anti-disturbance compound nonlinear servo controller, which is suitable for the second-order servo system described by the following model:
[0039]
[0040] in ;
[0041] x is the system state vector, express x The first derivative with respect to time, are the internal state variables of the system, For the control input signal, is a controlled and measurable system output, is a constant or slowly varying input disturbance, with is a scalar constant, and sat( ) is a saturation limiting function, including the following steps,
[0042] Step (1): Design compound nonlinear control law, including linear feedback control law and nonlinear feedback control law;
[0043] Step (2): Design a reduced-order extended state observer while estimating the unme...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More