

Finger Rehabilitation Training Device
A rehabilitation training and finger technology, applied in the field of medical equipment, can solve the problems of high price, complex system, poor perception ability, etc., and achieve the effect of reasonable structure, simple operation and strong dexterity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] Hereinafter, embodiments of the present invention will be described with reference to the drawings.
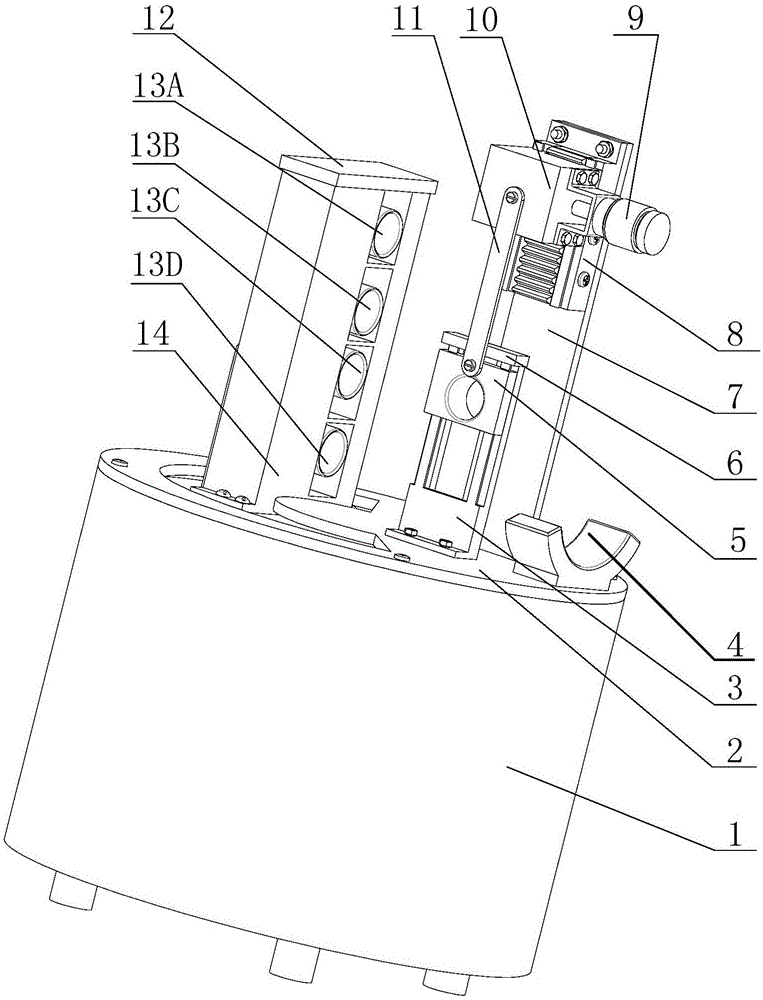
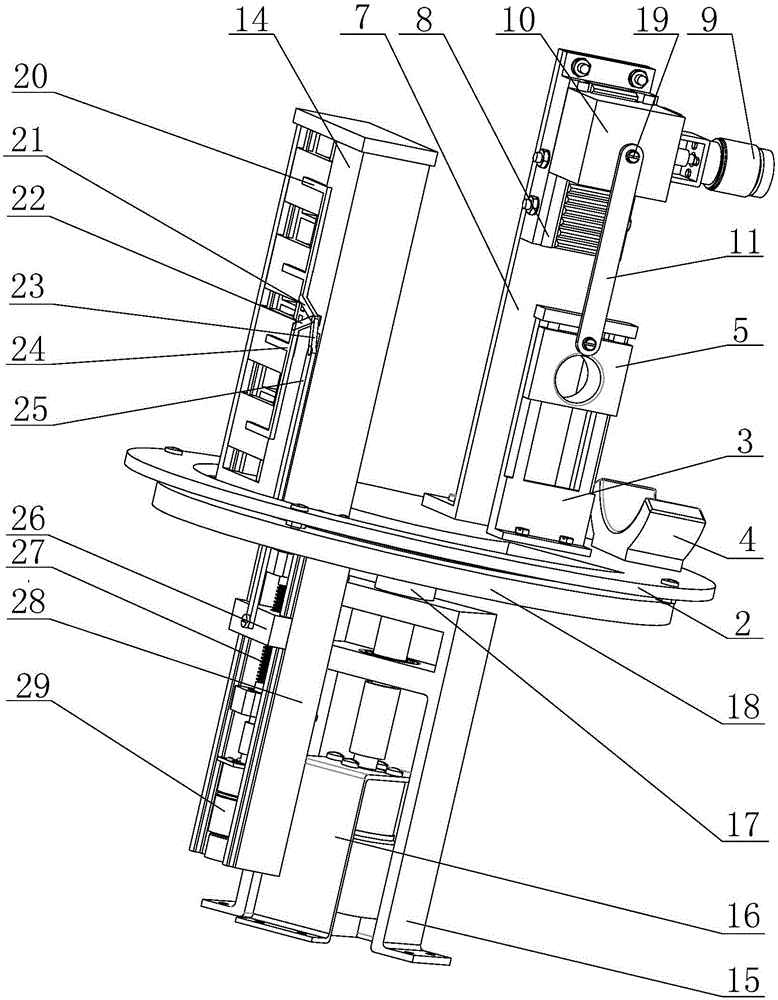
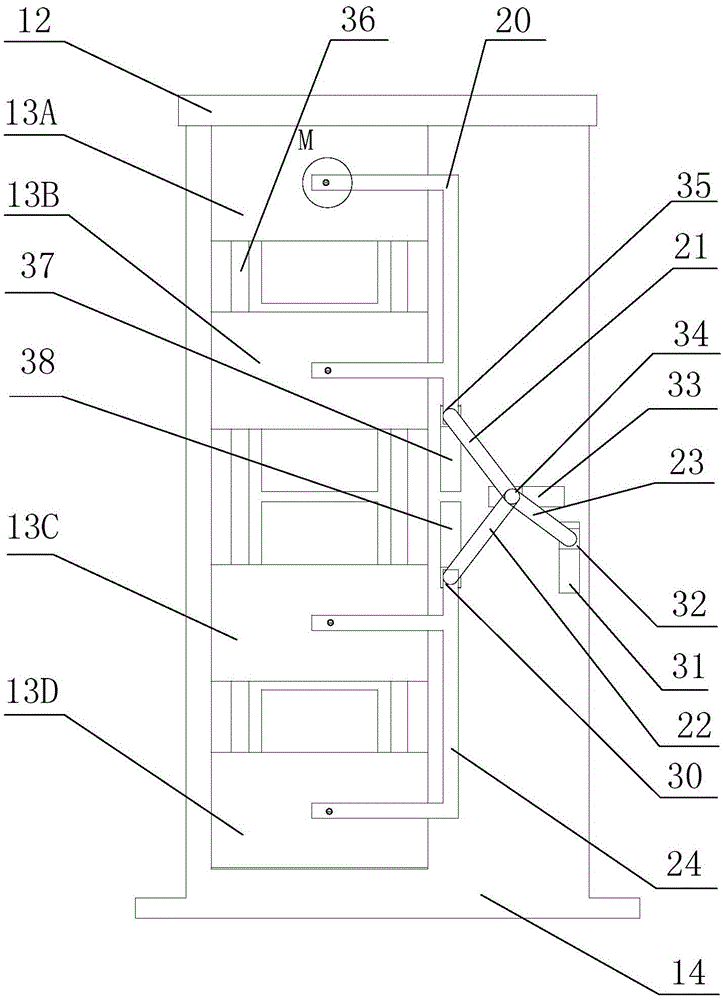
[0029] see figure 1 , 2 and Figure 10 , 11 , the finger rehabilitation training device of the present invention mainly includes a four-finger cot mechanism, a four-finger bending movement device (wheel drive mechanism), a four-finger adduction / abduction movement device (screw drive mechanism), a thumb cot mechanism, a thumb The bending motion device (rack and pinion drive mechanism), the four-finger bending motion device (wheel disk drive mechanism) and the four-finger adduction / abduction motion device (screw drive mechanism) are located in the shell 1, and the shell cover 2 is fixed with The arm support 4, the wheel disc 18 is located directly below the housing cover 2, the wheel disc 18 is connected to the drive shaft A43 in the four-finger bending motion device (wheel drive mechanism) through the support sleeve 17, and the four-finger sleeve frame 14 is verticall...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More