

System for surgical tool tracking
A surgical, tracker technology used in the field of systems that track the position and orientation of tools
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
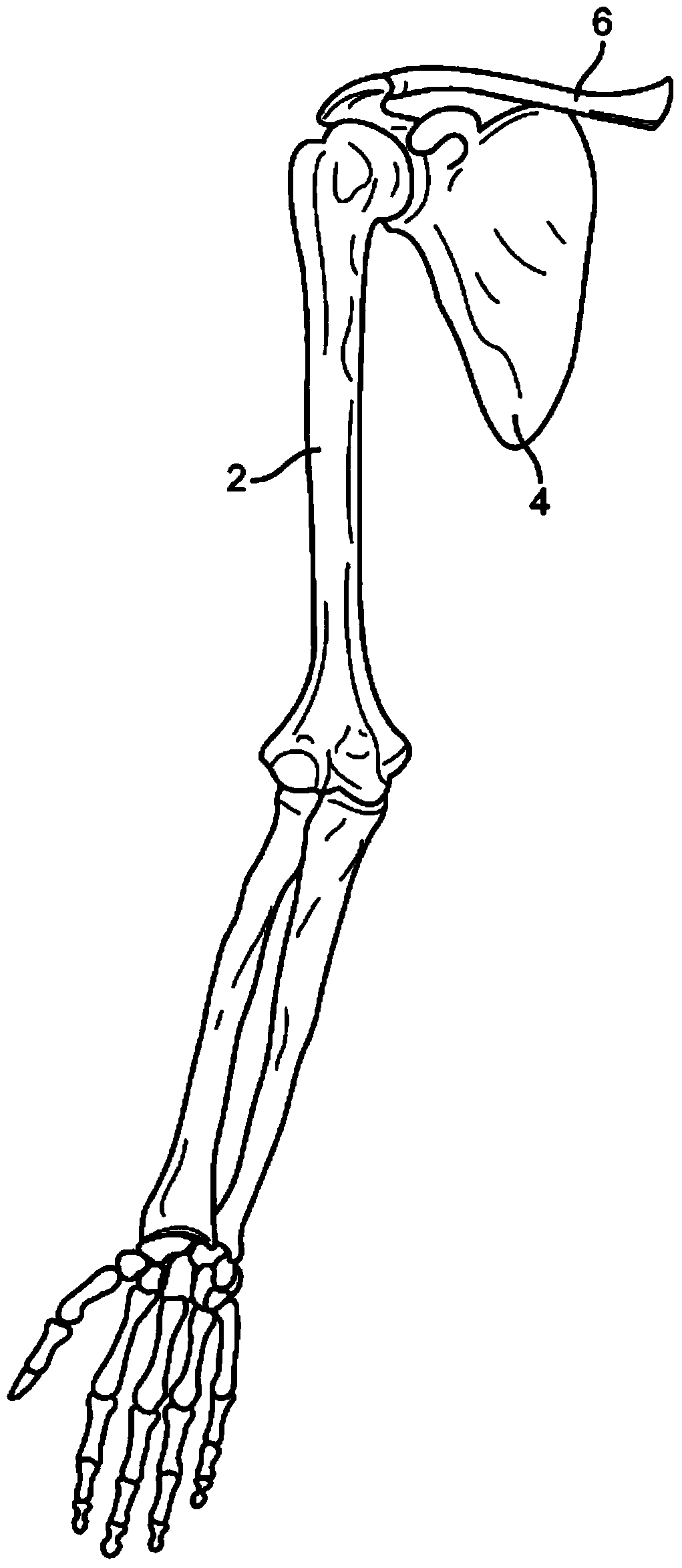
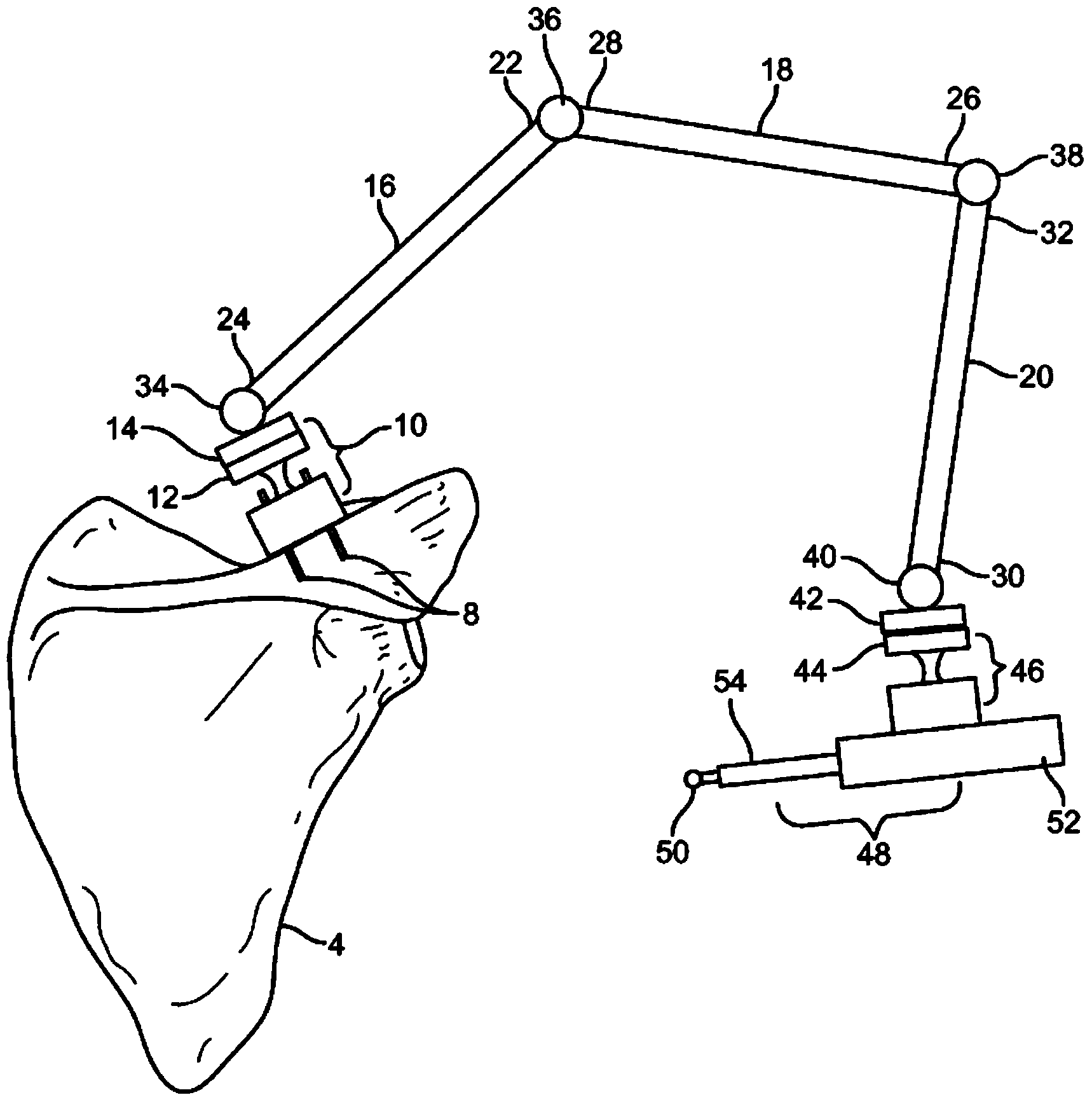
[0023] As described above, certain surgical techniques have evolved to rely on detailed knowledge of the spatial and rotational positioning of surgical instruments relative to target tissue. For example, in certain orthopedic surgical settings, it is desirable to utilize preoperative and intraoperative images and models of target tissue structures, as well as instruments (which are synchronized to coordinate a common system of instruments and anatomy), to predictably resolve Various target tissue structures. refer to figure 1, depicting some aspects of the skeletal anatomy of the shoulder, including the humerus (2), scapula (4), and clavicle (6). In scenarios where orthopedic surgical instruments are utilized to modify the geometry of one or more portions of this anatomy to repair damage, prepare prostheses, or other surgical goals, local mechanical trackers can be utilized intraoperatively to follow the intervention Rather, the position and orientation of the surgical instr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More