

Four freedom degree parallel mechanism with series input branch chains
A technology with series input and degrees of freedom, applied in electrical program control, digital control and other directions, can solve the problems of difficult positive kinematic solution, small working space, unfavorable control, etc., and achieve the effect of easy positive kinematics solution, large working space and simple mechanism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] In order to further understand the invention content, characteristics and effects of the present invention, the following examples are given, and detailed descriptions are as follows in conjunction with the accompanying drawings:
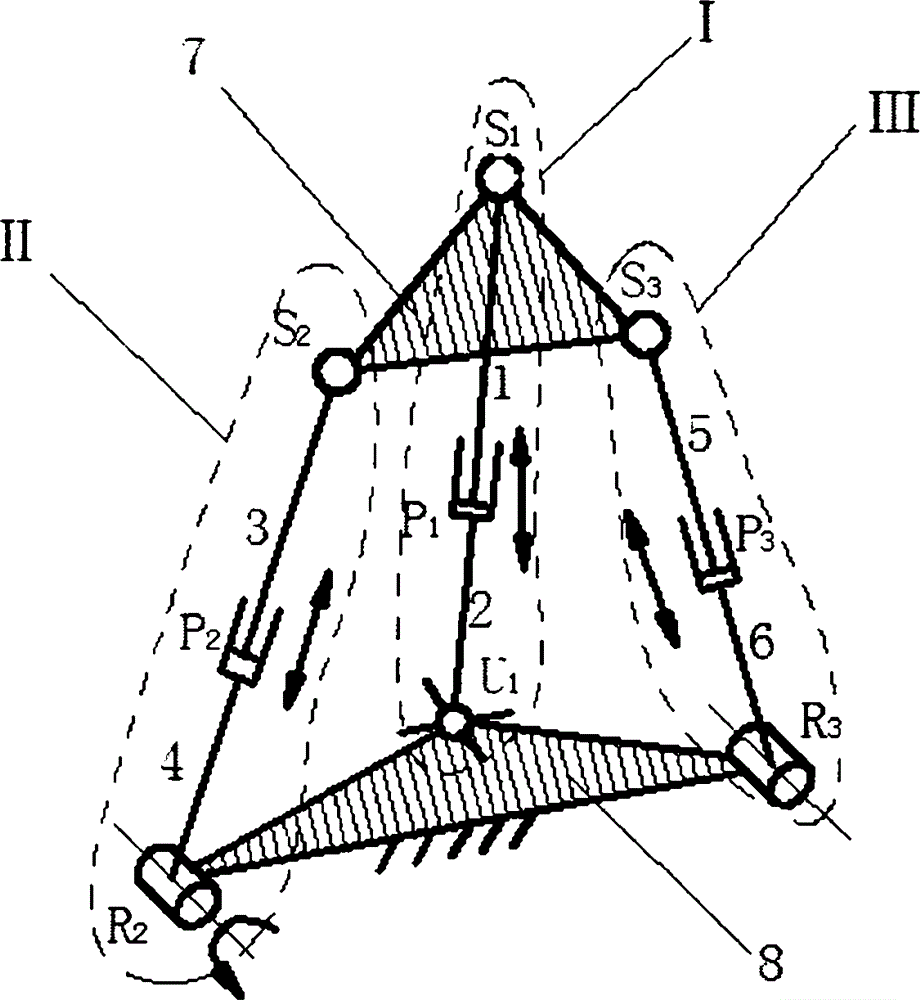
[0016] Such as figure 1 As shown, the present invention contains a four-degree-of-freedom parallel mechanism with series input branch chains, which consists of a dynamic platform 7, a static platform 8, and three branch chains I, II, and III with incomplete structures; the first branch chain I consists of a spherical Deputy S 1 , rod 1, moving pair P 1 , member 2 and Hooke hinge U 1 connected sequentially; the second branch chain II consists of spherical pair S 2 , rod 3, moving pair P 2 , rod 4 and rotating pair R 2 connected sequentially; the third branch III consists of spherical pair S 3 , rod 5, moving pair P 3 , rod 6 and rotating pair R 3 connected sequentially; the two ends of the branch chains are fixedly connected to the mov...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More