

Soft cable and pneumatic muscle combined drive robot for waist rehabilitation
A pneumatic muscle and waist rehabilitation technology, which is applied in the field of medical rehabilitation training equipment, can solve the problems that the effect of the flexible cable is not obvious, the angle of waist rotation is limited, and it is difficult to adapt to bending and swinging, so as to achieve the effect of good rehabilitation training effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with the embodiment in the accompanying drawings:
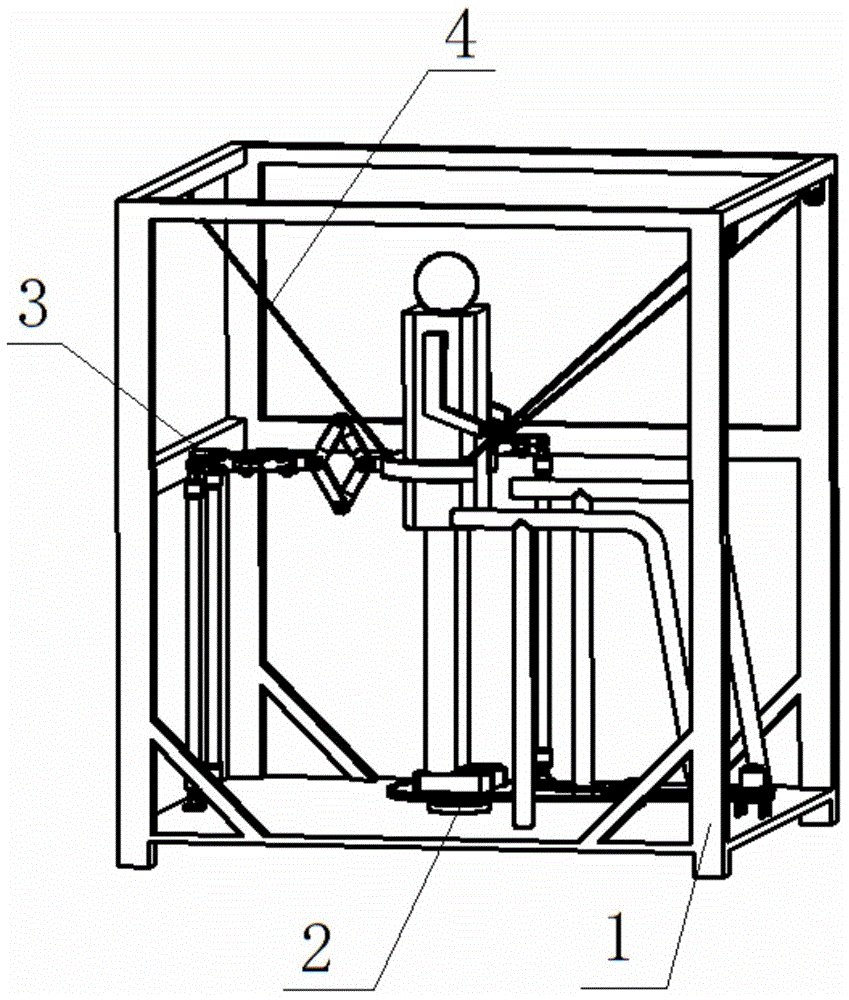
[0024] Such as figure 1 As shown, a soft cable pneumatic muscle joint drive waist rehabilitation device includes a cube base 1, a flexible cable drive part 4, a pneumatic muscle drive part 3, a rotating platform 2 and a waist platform 15, and the bottom of the cube base 1 is provided in the middle. There is a rotating platform 2 for the human body to stand and drive the waist to rotate. Above the rotating platform 2, a waist platform 15 is provided according to the average adult height to assist the human body to stand and drive the waist to move. The waist platform 15 is horizontal The U-shaped waist platform is placed, the two sides of the U-shaped waist platform are respectively connected to a set of pneumatic muscle driving parts 3, and the two ends and the bottom of the U-shaped end are respectively connected to a flexible cable driving part 4; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More