

Ankle Joint Assisted by Exoskeleton Cushioning
An exoskeleton and ankle joint technology, applied in the field of robotics, can solve the problems of unnatural action, complex structure and production process, and high cost, and achieve the effects of ensuring comfort, ensuring safety, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings.
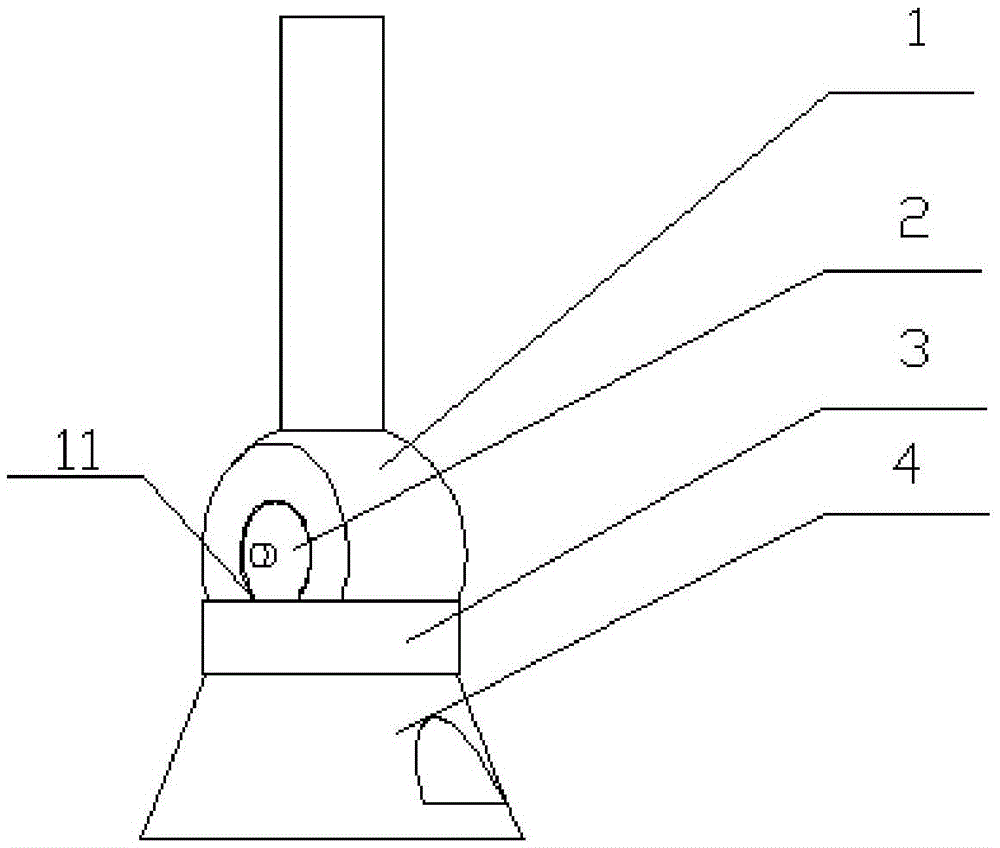
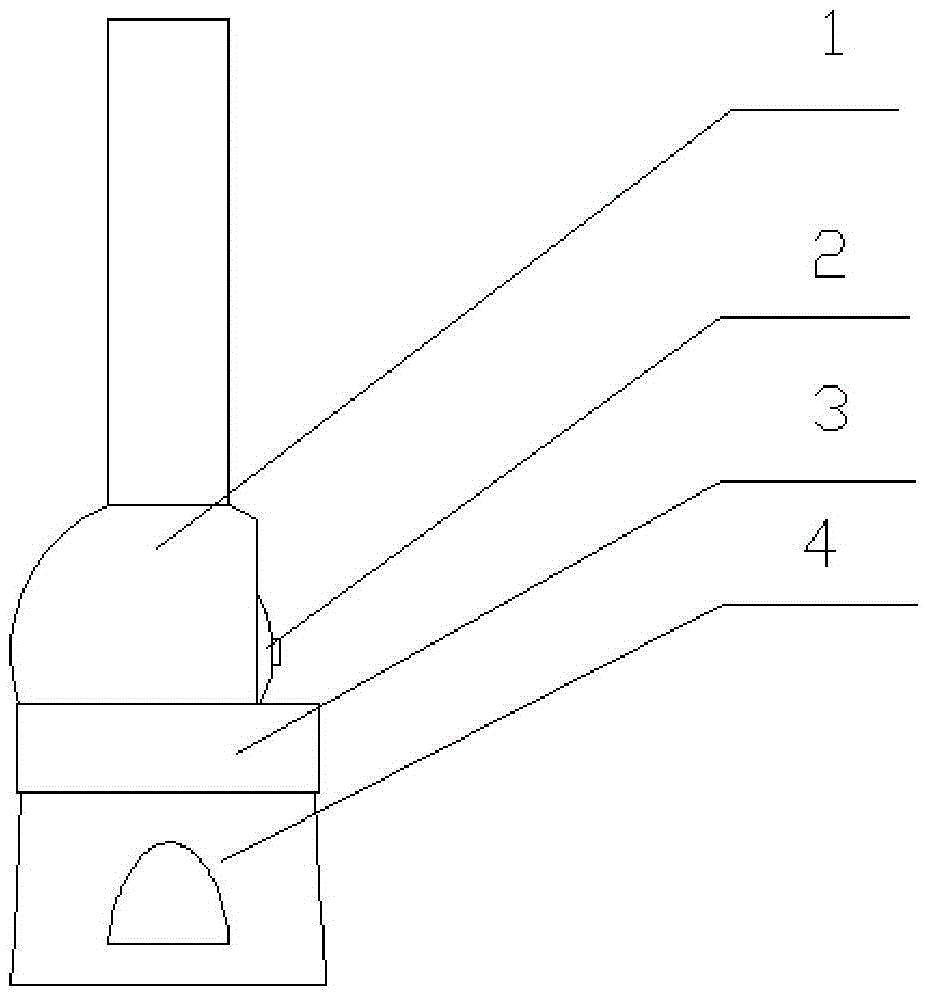
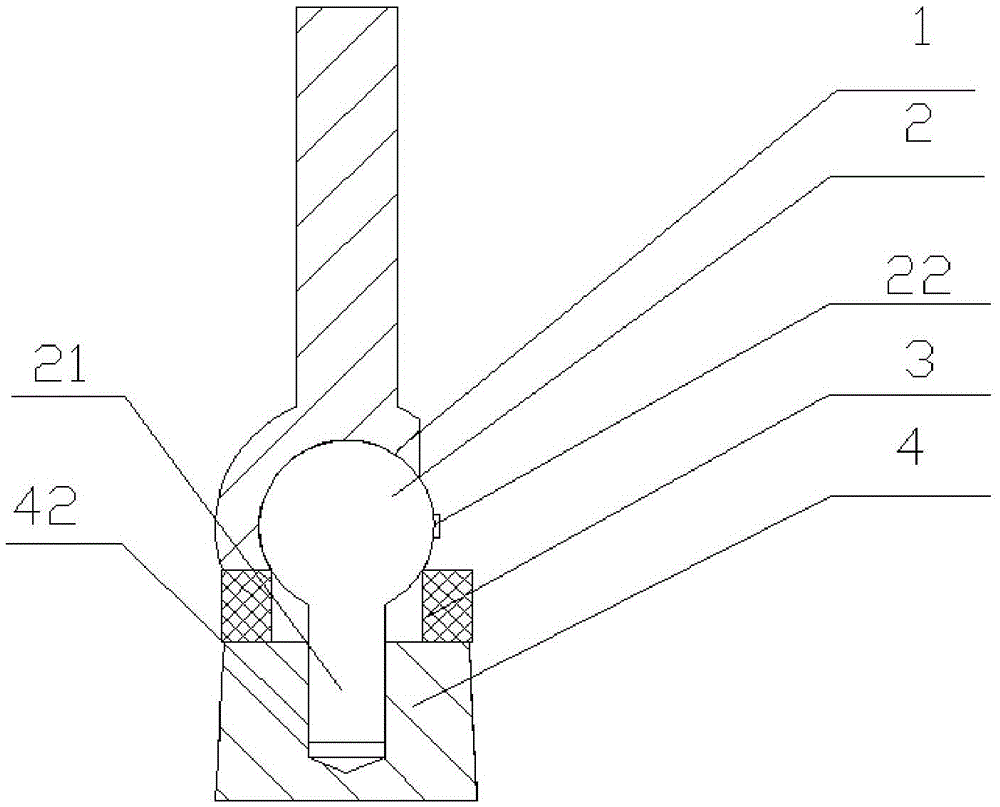
[0016] Such as Figure 1-5 As shown, the exoskeleton of the present invention cushions and assists the ankle joint, comprising: an ankle ball socket 1, an ankle ball head 2, a rubber gasket 3 and an ankle seat 4; the front and rear parts of the ankle seat 4 each have a through hole 41 for Connect with the foot, there is a hole 42 in the middle of the ankle seat 4, the hole 42 is connected with the shaft 21 on the ankle ball 2 with an interference fit, a boss 22 is welded on the ankle ball 2, the ankle The ball socket 1 cooperates with the ankle ball head 2. There is a groove 11 on the ankle ball socket 1. The boss 22 on the ankle ball head 2 can protrude from the groove 11. The cooperation between the groove 11 and the boss 22 can be realized on the left and right sides. The limit in the rotation direction ensures that the foot movement is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More