

Six-legged stair climbing wheelchair
A stair and wheelchair technology, applied in the field of service robots for the elderly and disabled, can solve the problems of easy-to-damage stair anti-skid measures, occupant discomfort, application restrictions, etc., to ensure safety and comfort, good stability margin, and ensure safety. sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
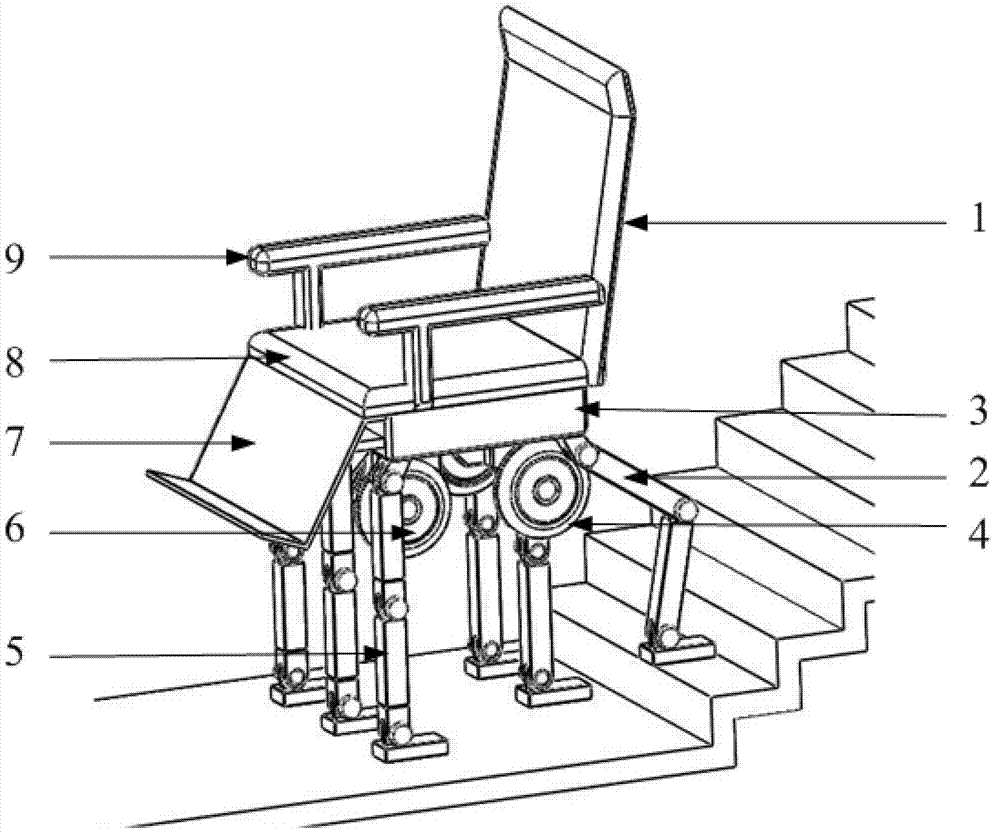
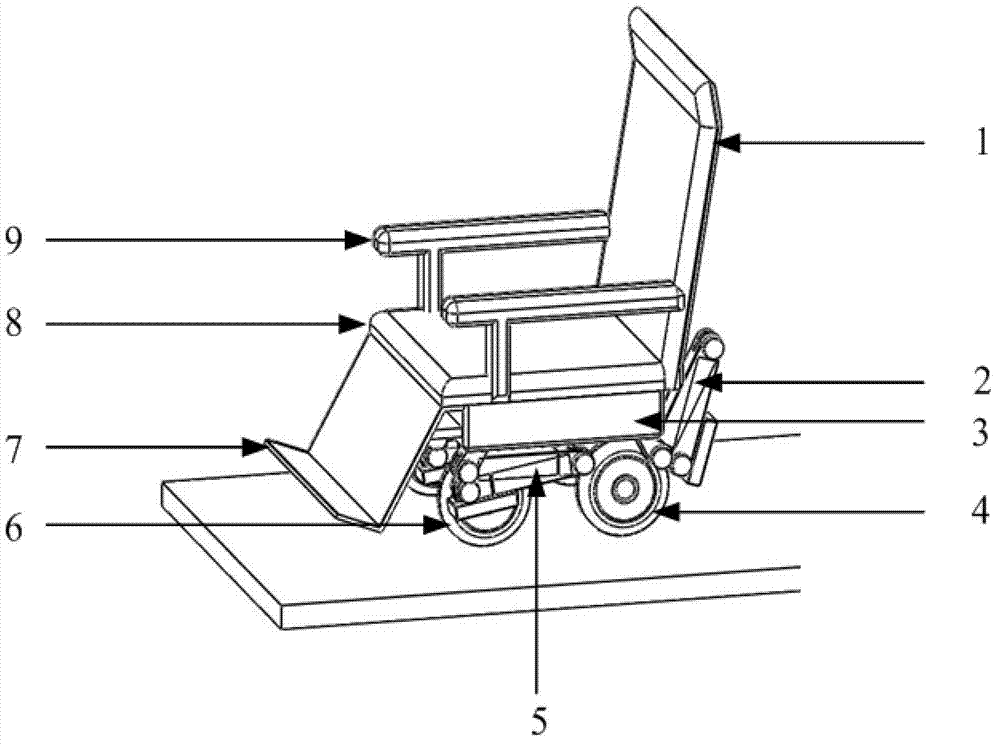
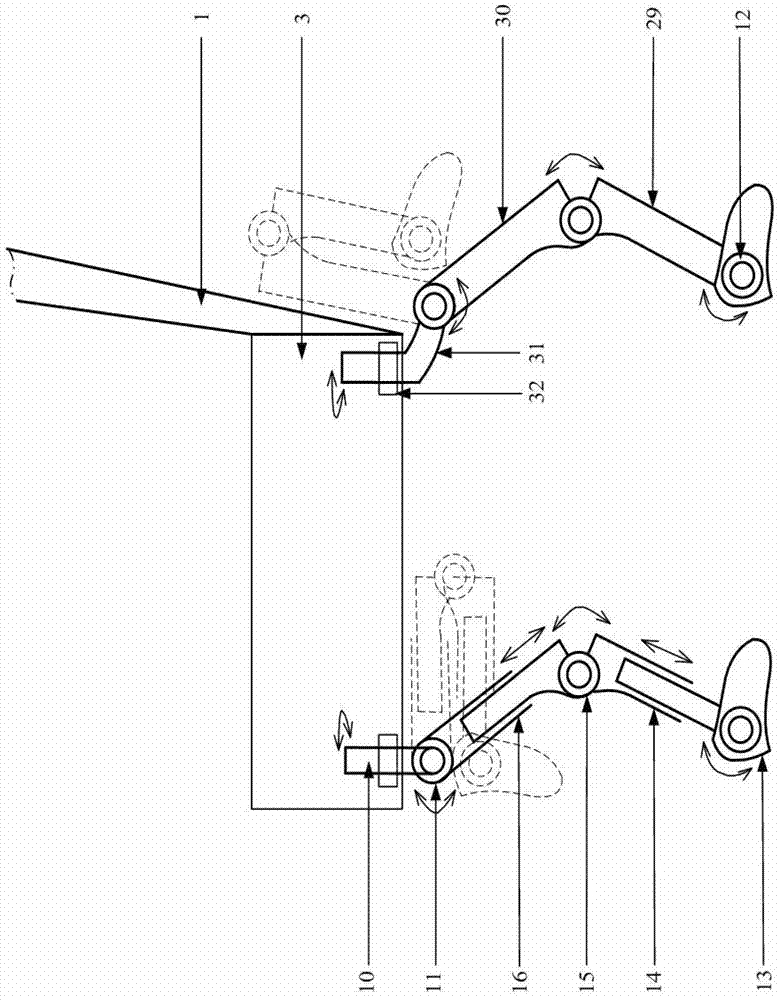
[0027] exist figure 1 Among them, 6 mechanical legs are evenly distributed under the seat of the wheelchair on the front side of the chair and the back side of the chair on the left, middle and right sides. Such as image 3 As shown, the structure of the mechanical leg is similar to that of a human leg, which is divided into the longitudinal axis of the hip joint 10, the hip joint 11, the thigh 30, the knee joint 15, the calf 29, the ankle joint 12 and the foot 13, the hip joint 11 is downward and the thigh 30 connection, thigh 30 and calf 29 are connected through knee joint 15, and calf 29 and foot 13 are connected through ankle joint 12. The vertical axis 10 of the hip joint is installed upwards in the power controller box 3 through the thrust bearing 32, and is driven by a servo motor so that the front leg 5 of the chair and the leg 2 of the back of the chair can rotate around the vertical axis, thereby realizing the hexapod stair climber. Steering operation of climbing w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More