

Anti-interference control method of motor position servo system
A servo system and motor position technology, applied in the field of motor position servo, can solve the problem of uncertain nonlinearity of the motor position servo system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0077] In order to better understand the technical content of the present invention, specific embodiments are given together with the attached drawings for description as follows.
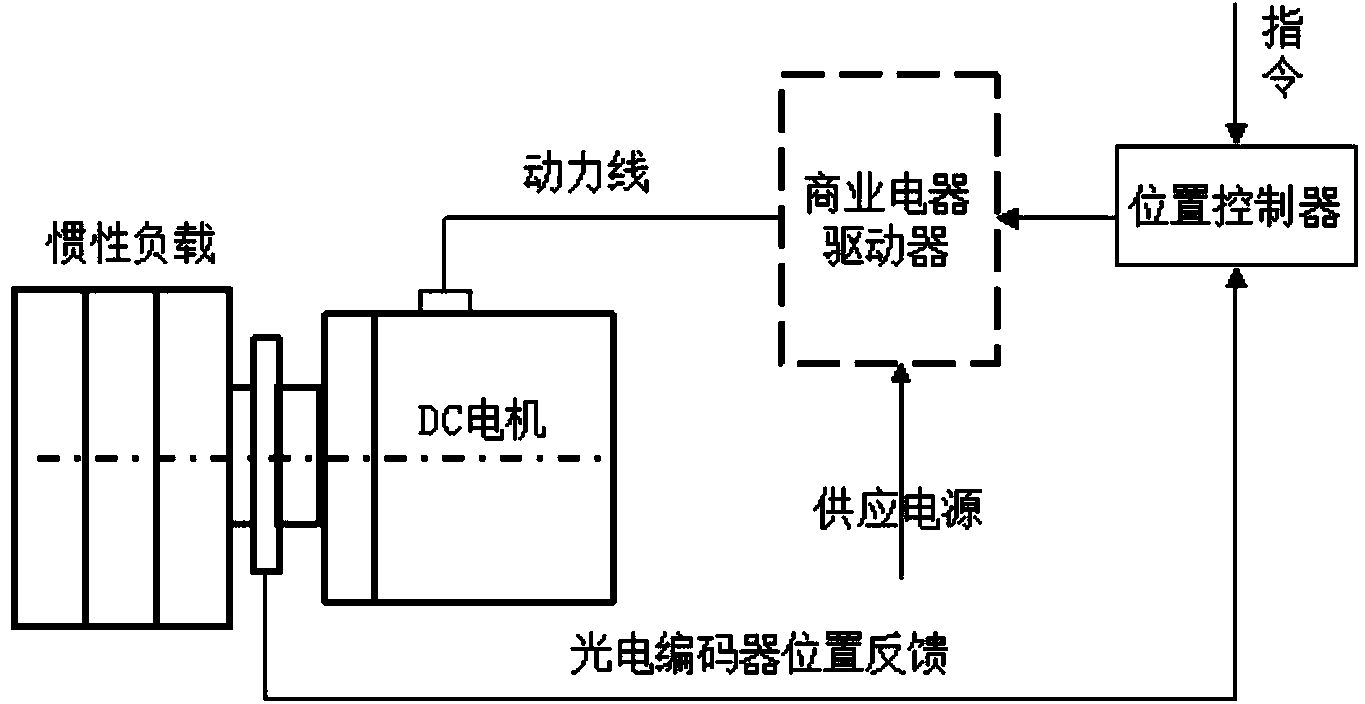
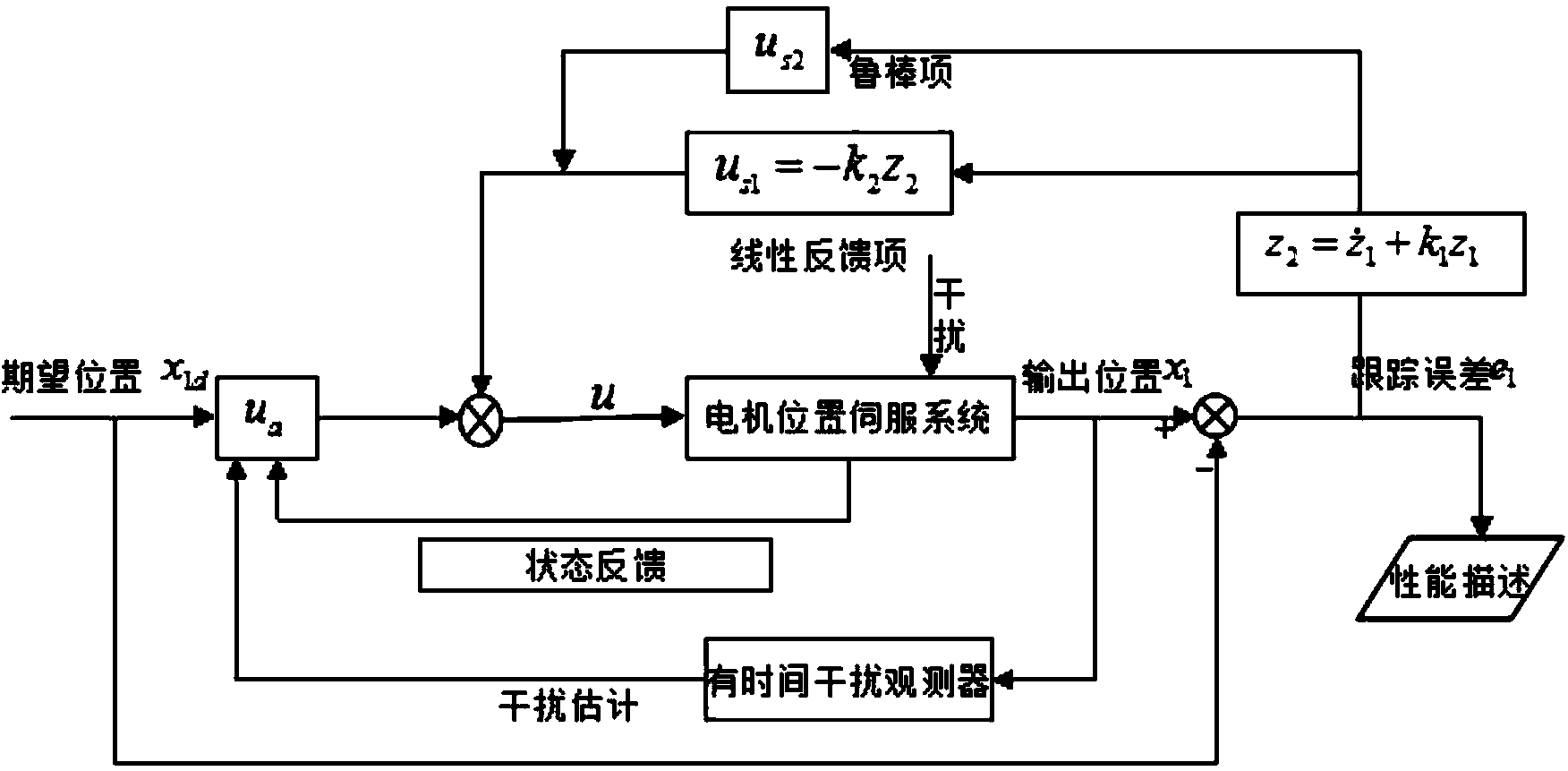
[0078] combine figure 1 , figure 2 As shown, according to a preferred embodiment of the present invention, an anti-interference control method of a motor position servo system, its realization includes the following steps:
[0079] Step 1. Establish the motor position servo system model;
[0080] Step 2. Designing a motor robust controller based on finite time disturbance estimation according to the model established above;
[0081] Step 3. Make the system meet the control performance index by adjusting the parameters in the robust controller based on finite-time disturbance estimation.
[0082] Combine below Figure 1-Figure 9 As shown, the specific implementation of the foregoing steps in this embodiment is described in detail.
[0083] Step 1. Establish a motor position servo system model ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More