

Active Disturbance Rejection Control Method for Motor Servo System Considering State Constraints
A technology of active disturbance rejection control and active disturbance rejection controller, which is applied in the field of control, can solve problems such as uncertain state constraints of motor position servo system, and achieve the effect of solving uncertain nonlinear problems and simplifying design.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0176] The initial state of the system is x 1 (0)=1,x 2 (0)=0, in the simulation, the controller designed in this paper takes the following parameters to model the system: m=0.01, k f =5, b=1.25N·s / m, θ 1n =400,θ 2n =80,k 1 =70,k 2 =0.001,b 1 = 2,b 2 =0.01,L 1 = 2, L 2 =200, ω=800. The PID controller parameter is k p =110,k i =70,k d = 0.3. Position angle input signal y d (t)=2sin(πt)[1-exp(-0.01t 3 )] rad, d(x,t)=100sin(2πt)N·m.
[0177] The effect of the control law:
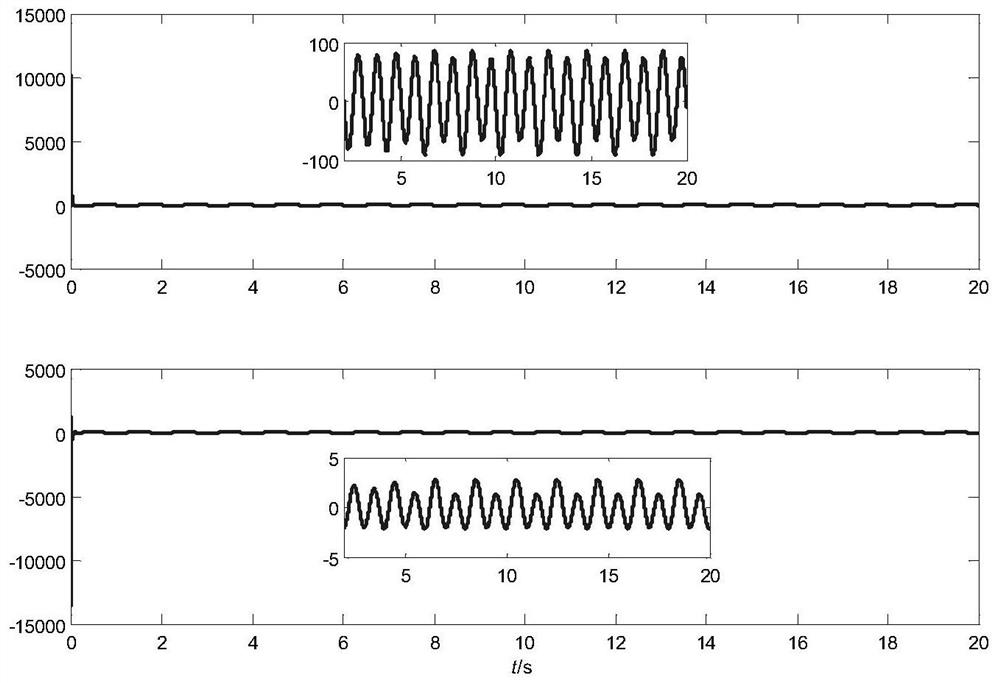
[0178] image 3 is the interference estimate and the interference estimate error curve.
[0179] Figure 4 is state x 1 Estimates and their estimation error curves.
[0180] Figure 5 are the output states of the two controllers.
[0181] Figure 6 It is the input voltage u curve of the designed controller under the action of interference, and the input voltage of the controller satisfies the input range of -10V~+10V, which is in line with practical application.
[0182] Figure 7 a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More