

Electro-hydraulic servo system full state constraint control method based on extended state observer
An electro-hydraulic servo system, technology of expansion state, applied in the field of control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
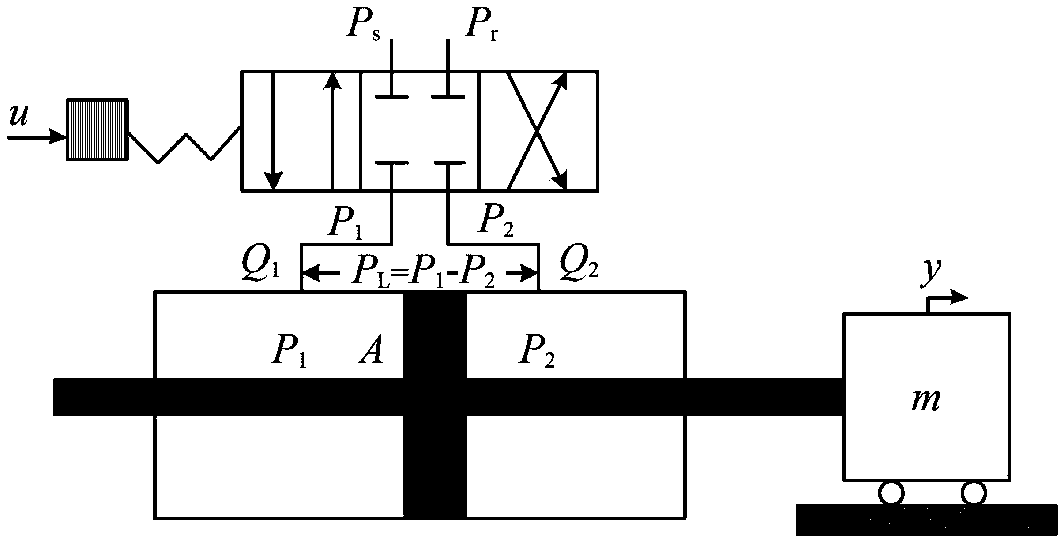
[0206] In the simulation, take the following parameters to model the system: m=40kg, A=2×10 -4 m 2 , B=80N·s / m, β e =200Mpa, V 01 =1×10 -3 m 3 ,V 02 =1×10 -3 m 3 ,C t =9×10 -12 m 5 / Ns,K t =4×10 -8 m 4 / (s·A·),P s =7Mpa,P r = 0 MPa. To verify the performance of the designed controller, the following two controllers were compared:
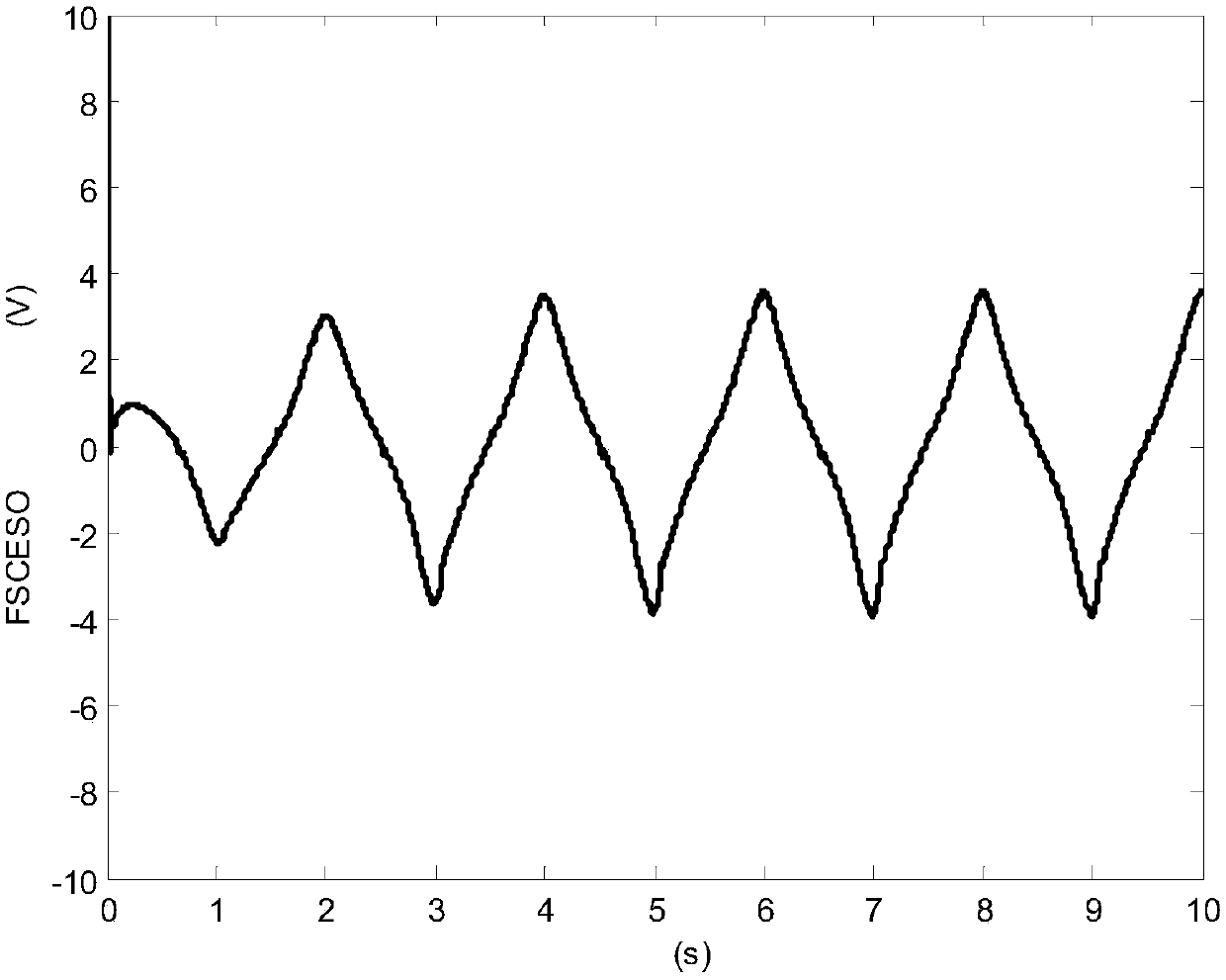
[0207] FSCESO: The extended state observer-based fully state-constrained controller (FSCESO) proposed in this chapter, the controller parameters are: k 1 =1000,k 2 =500,k 3 =200,ω 2 = 500, ω 3 =500,b 1 =30,b 2 =9, b 3 = 3, L 1 =0.5, L 2 =5,L 3 =80, [θ 1n ,θ 2n ,θ 3n ,θ 4n ] T =[133,21.7,1.09×10 6 ,8] T .
[0208] PI: Proportional-integral controller, which is also widely used in industrial systems, especially systems where only the position signal is known, and the controller parameter is k p =1500,k i =500.
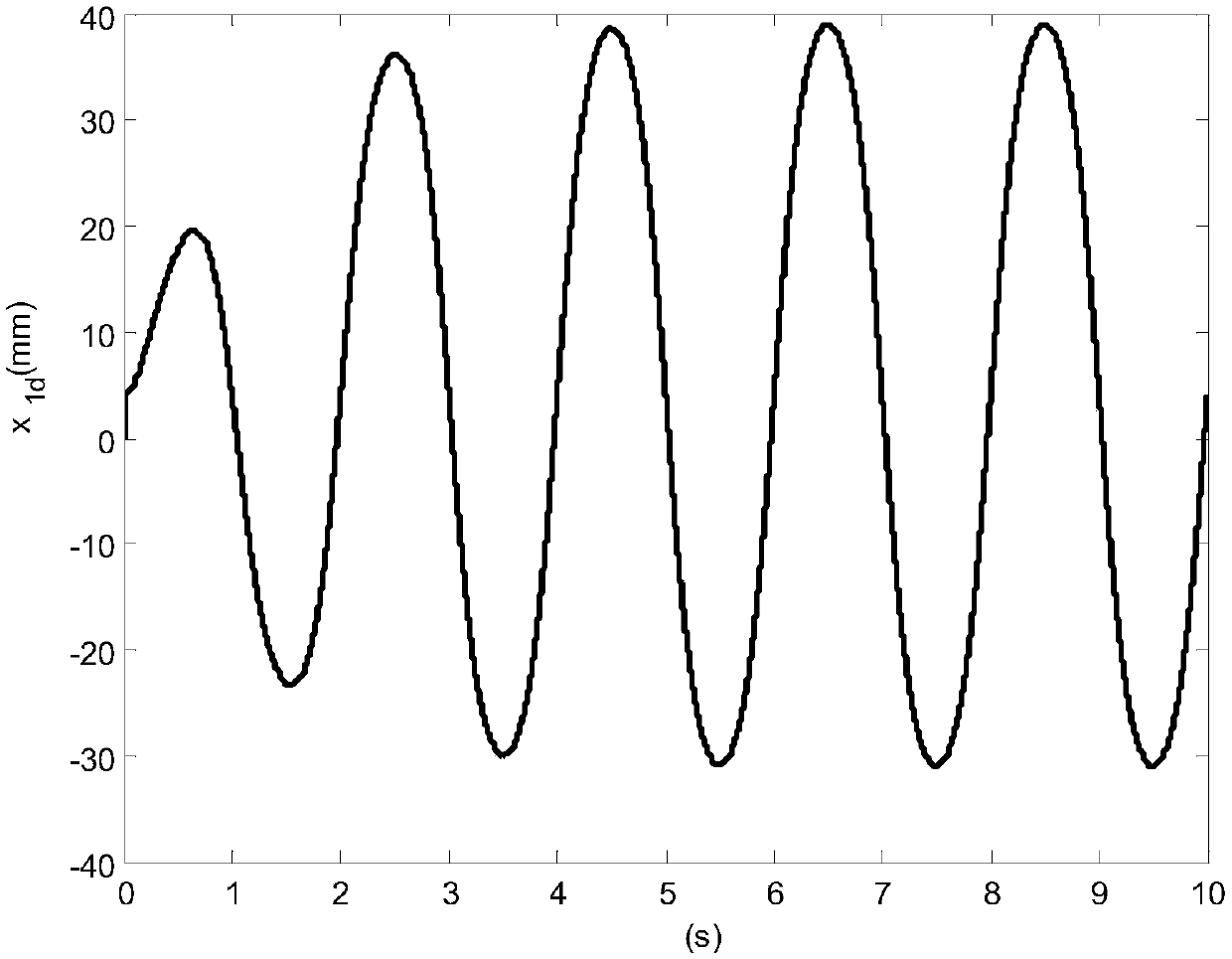
[0209] The system command is x 1d =35arctan(sin(πt))[1-exp(-t)]+4mm, the effect of control law:
[021...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More