

Full-state constrained control method for electro-hydraulic servo system based on extended state observer
An electro-hydraulic servo system and expansion state technology, applied in the field of control, to simplify the design of the controller, solve uncertain nonlinear problems, and reduce the effect of feedback gain
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
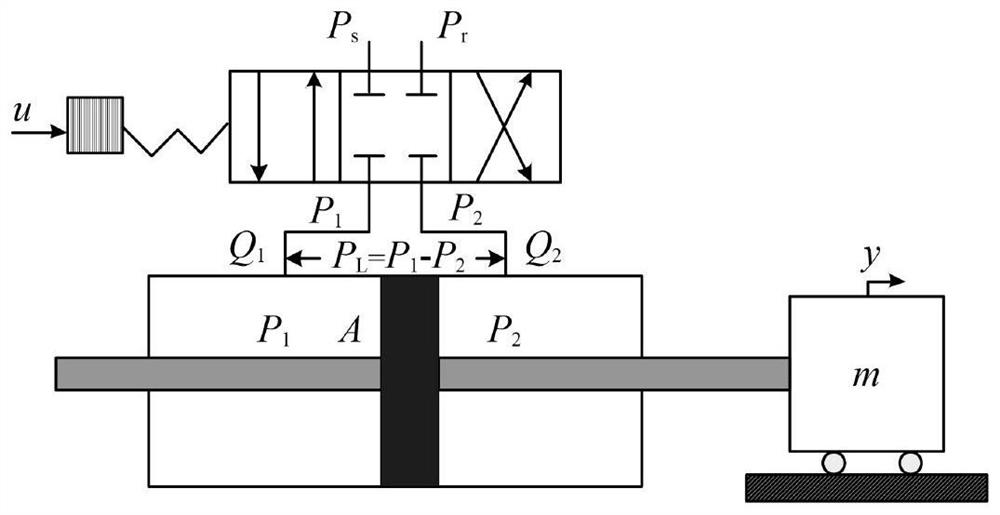
[0206] In the simulation, the following parameters are taken to model the system: m=40kg, A=2×10 -4 m 2 , B=80N·s / m, β e =200Mpa, V 01 =1×10 -3 m 3 ,V 02 =1×10 -3 m 3 ,C t =9×10 -12 m 5 / Ns,K t =4×10 -8 m 4 / (s·A·),P s =7Mpa,P r =0Mpa. To verify the performance of the designed controller, the following two controllers were compared:
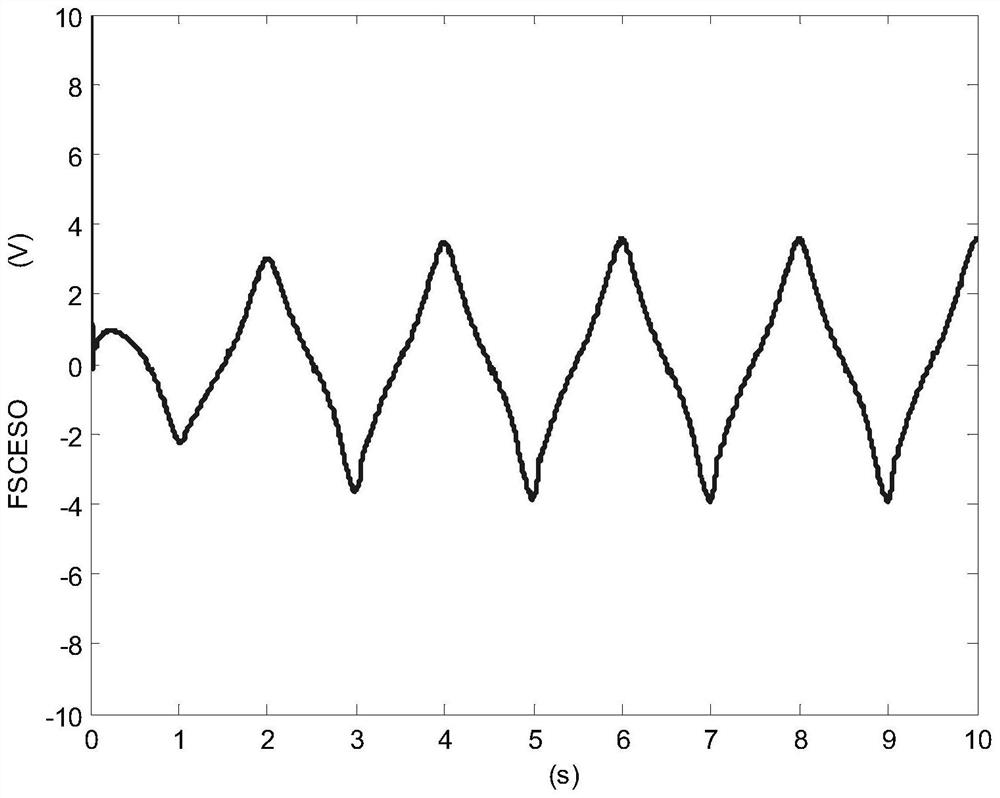
[0207] FSCESO: The full state constrained controller (FSCESO) based on extended state observer proposed in this chapter, the controller parameters are: k 1 =1000,k 2 =500,k 3 =200,ω 2 =500, ω 3 =500, b 1 =30, b 2 =9,b 3 =3, L 1 = 0.5, L 2 =5, L 3 =80, [θ 1n ,θ 2n ,θ 3n ,θ 4n ] T =[133,21.7,1.09×10 6 ,8] T .
[0208] PI: Proportional-integral controller, which is also widely used in industrial systems, especially systems where only the position signal is known, the controller parameter is k p =1500,k i =500.
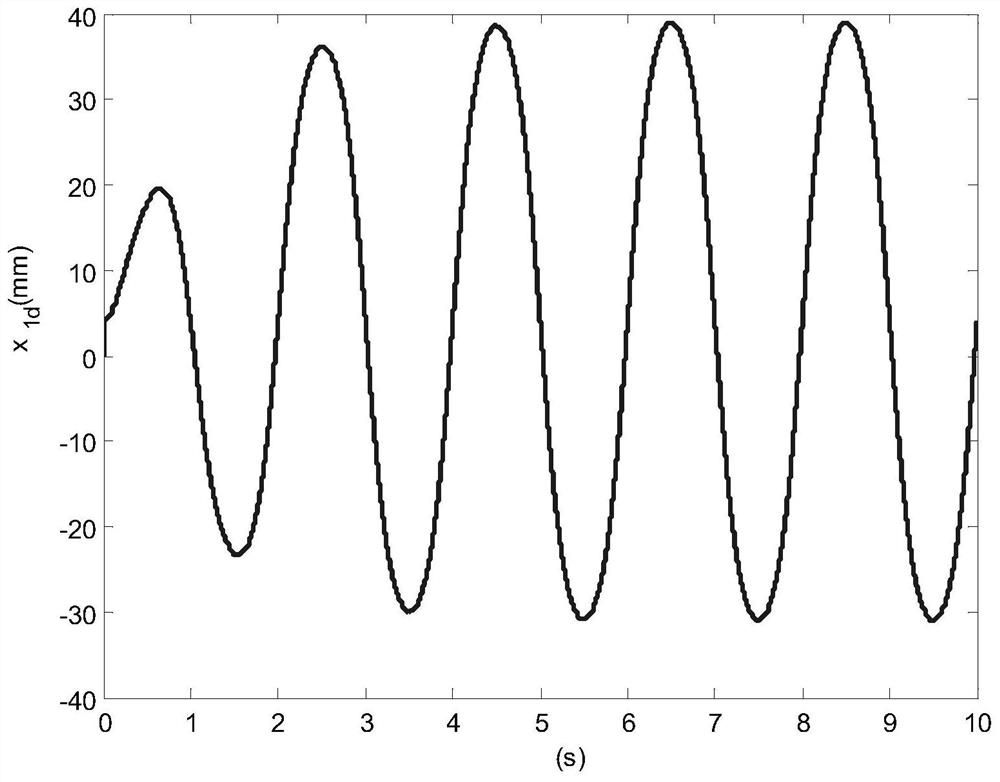
[0209] The system command is x 1d =35arctan(sin(πt))[1-exp(-t)]+4mm, control law effect:
[0210] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More