

Adaptive state-constrained control method for electro-hydraulic servo system based on disturbance compensation
An electro-hydraulic servo system and state-constrained technology, applied in the direction of adaptive control, comprehensive factory control, general control system, etc., to achieve the effect of solving uncertain nonlinear problems, reducing feedback gain, and simplifying design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0108] Step 3: Adjust the relevant parameters to make the system meet the control performance index.
[0110]
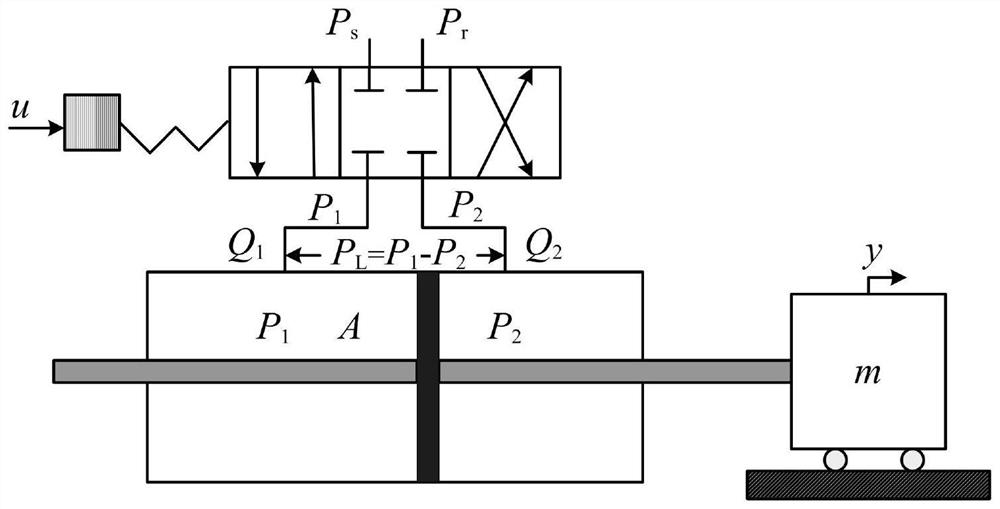
[0111] In the formula: y is the load displacement, m represents the inertial load, and P
[0112]
[0114] Q
[0115]
[0117]
[0119]
[0122]
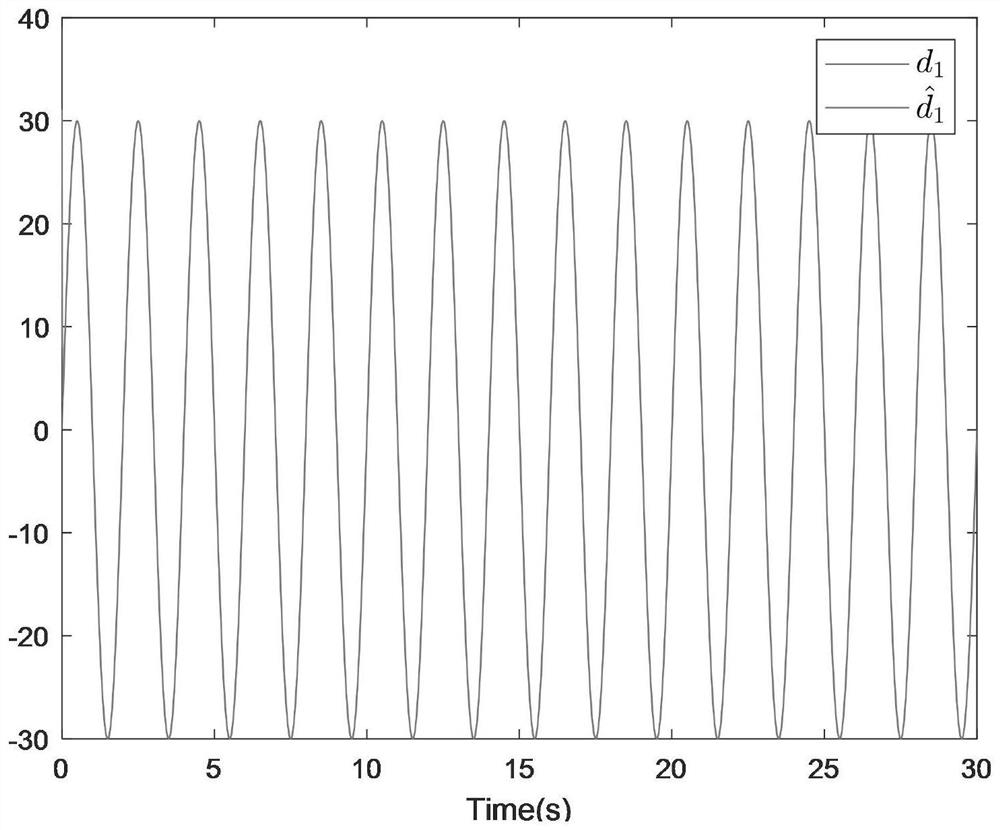
[0124] Assumption 1: d
[0125]
[0129]
[0132]
[0134]
[0136] Definition 2: The expansion state can be obtained
[0137]
[0138] Since A
[0141]
[0144]
[0146]
[0149]
[0151]
[0154]
[0156]
[0159]
[0160] S3: Design the actual control input u to ensure z
[0161]
[0165]
[0167]
[0169]
[0171]
[0176]
[0179]
[0180] The system is asymptotically convergent, that is, when t→∞, z
[0182]
[0184]
[0186]
[0188]
[0191]
[0194]
[0196] Thus the controller is convergent and the system is stable.
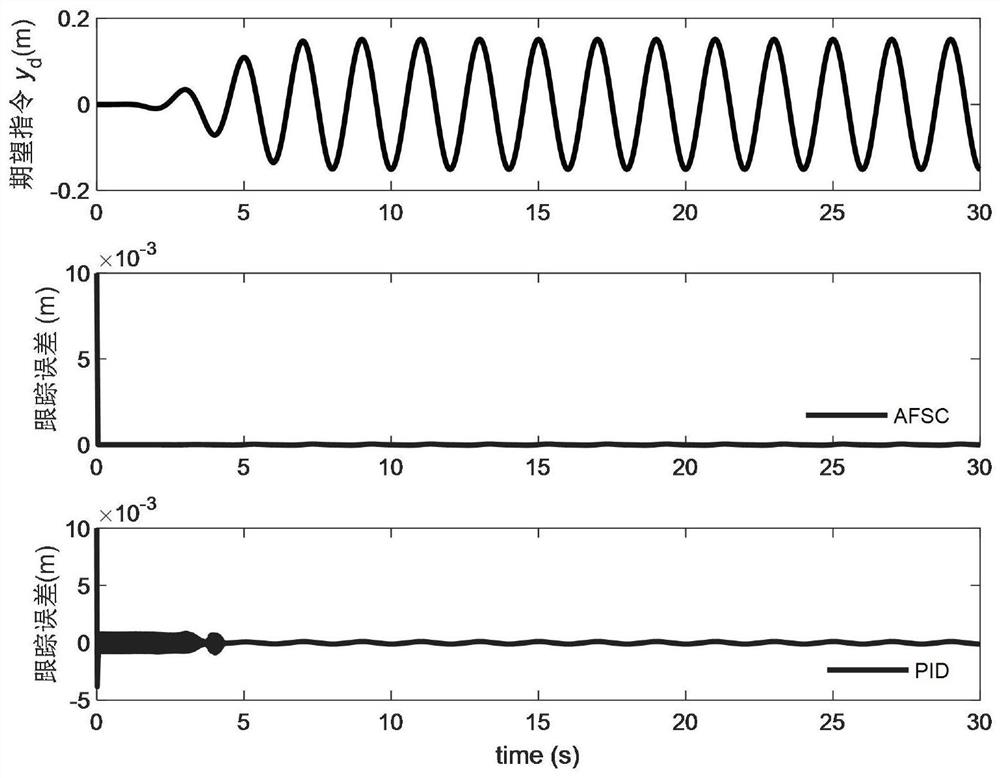
[0200] The adaptive state constraint controller (ASC) of the electro-hydraulic servo system based on disturbance compensation proposed in this chapter, the controller
[0204] The above-disclosed preferr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More