

Air-ground amphibious robot
A robot, land-air technology, applied in the field of land-air amphibious robot devices, can solve the problems of obstacle surmountability, lack of smooth ground adaptability, etc., and achieve the effect of light weight, simple control method, and simplified mechanical structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
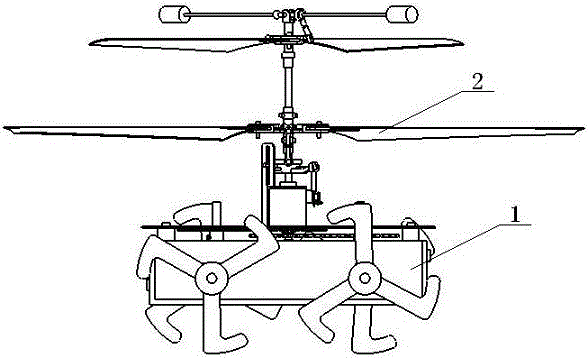
[0018] The land travel device 1 is fixedly connected with the flight device 2,
[0019] The structure of the land travel device 1 is as follows: the motor bracket 102 is fixedly connected with the chassis 106, the motor A 103 is fixedly installed on the motor bracket 102 by screws, the motor A 103 is connected with the pinion 111 through a key, and the pinion 111 is connected with the large The gear 110 is meshed and connected, the large gear is fixedly connected with the large gear shaft 112 through a key, the worm B107 is rotationally connected with the worm B support 101, the worm B and the worm A113 are respectively coaxially connected with the large gear shaft, and the worm B108 is connected with the worm B support 104 Rotationally connected, the worm B is meshed with the worm wheel B, the worm wheel shaft B109 is fixedly connected with the worm wheel B, the worm shaft B is coaxially connected with the bionic wheel 105, and the worm A is meshed with the worm wheel A114;
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More