

Phase Estimation Method of X-ray Pulsar Based on Loop Tracking
A loop tracking and phase estimation technology, applied in astronomical navigation and other directions, can solve the problem of estimation accuracy degradation, and achieve the effect of improving accuracy, improving measurement accuracy, and ensuring correctness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
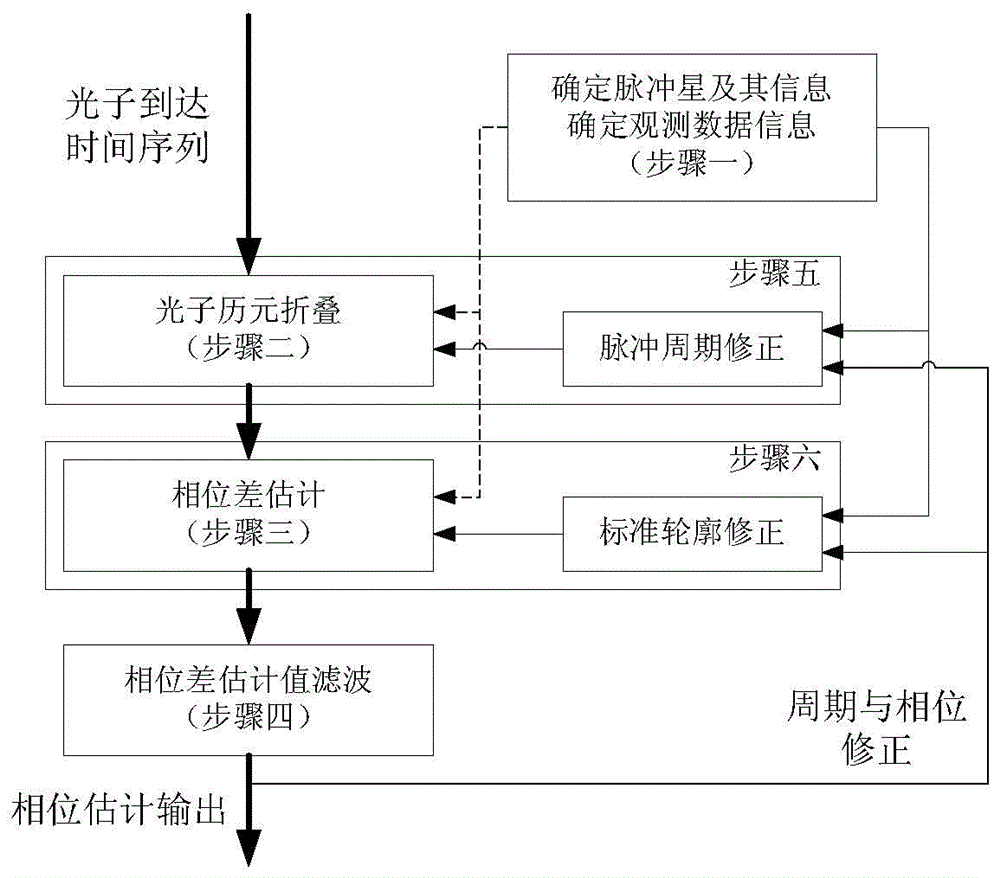
[0049] Step 1: Determine the observed pulsar and record its pulse period P under static conditions 0 with the standard profile s(n). In this example, the observed pulsar is PSR B0531+21, and its pulse period under static conditions is P 0 = 33.085ms. The observation starting point is τ 0 =55746.0MJD, processing step τ s =1s, observation time length τ obs = 2s. The arrival time of all photons is collected in the observation period, denoted as τ k (k=1,2,3,...). The total number of sampling points N=1024.
[0050] Step 2: For the first group of photon arrival time series τ k ∈[0s,1s], the folding is performed according to the pulse period P0 under static conditions, and the folding reference point is taken as 0.5s. First define the measurement pulse profile c(n)=0, (n=1,2,...,1024), if the arrival time of the kth photon satisfies:
[0051]
[0052] Where {} means rounding up, it is considered that the photon arrival time corresponds to the nth time grid of the foldi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More