

Robot off-line teaching device and compensation teaching method
An offline teaching and teaching method technology, applied in the field of robotics, can solve problems such as the motion parameter error of the articulated arm without power teaching, and achieve the effect of reducing the difficulty of teaching operation, reducing the process of robot trajectory correction, and improving programming efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and through specific implementation methods.
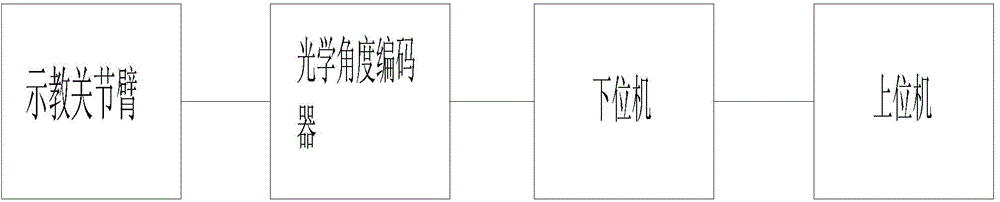
[0016] Such as figure 1 As shown, the present invention provides a robot off-line teaching device, including: a teaching articulated arm, used to demonstrate robot operation; The angle information of the joints; the lower computer is used to store the computer-readable code generated by the motion trajectory and communicate with the upper computer in real time; the upper computer is used to send the computer-readable code to any robot to execute commands.
[0017] An off-line compensation teaching method for a robot, comprising the above-mentioned robot off-line teaching device, using a six-degree-of-freedom teaching joint arm as a teaching acquisition unit, installing an optical angle encoder and a data processing unit on each joint of the teaching joint arm, Each unit can independently and simult...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More