

Fast teaching method for industrial robots
An industrial robot and teaching method technology, which is applied to manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of inappropriate speed ratio, poor operability, and long time required to improve efficiency and reduce teaching. Error, the effect of improving teaching accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to make the objectives, technical solutions, and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with embodiments and drawings.
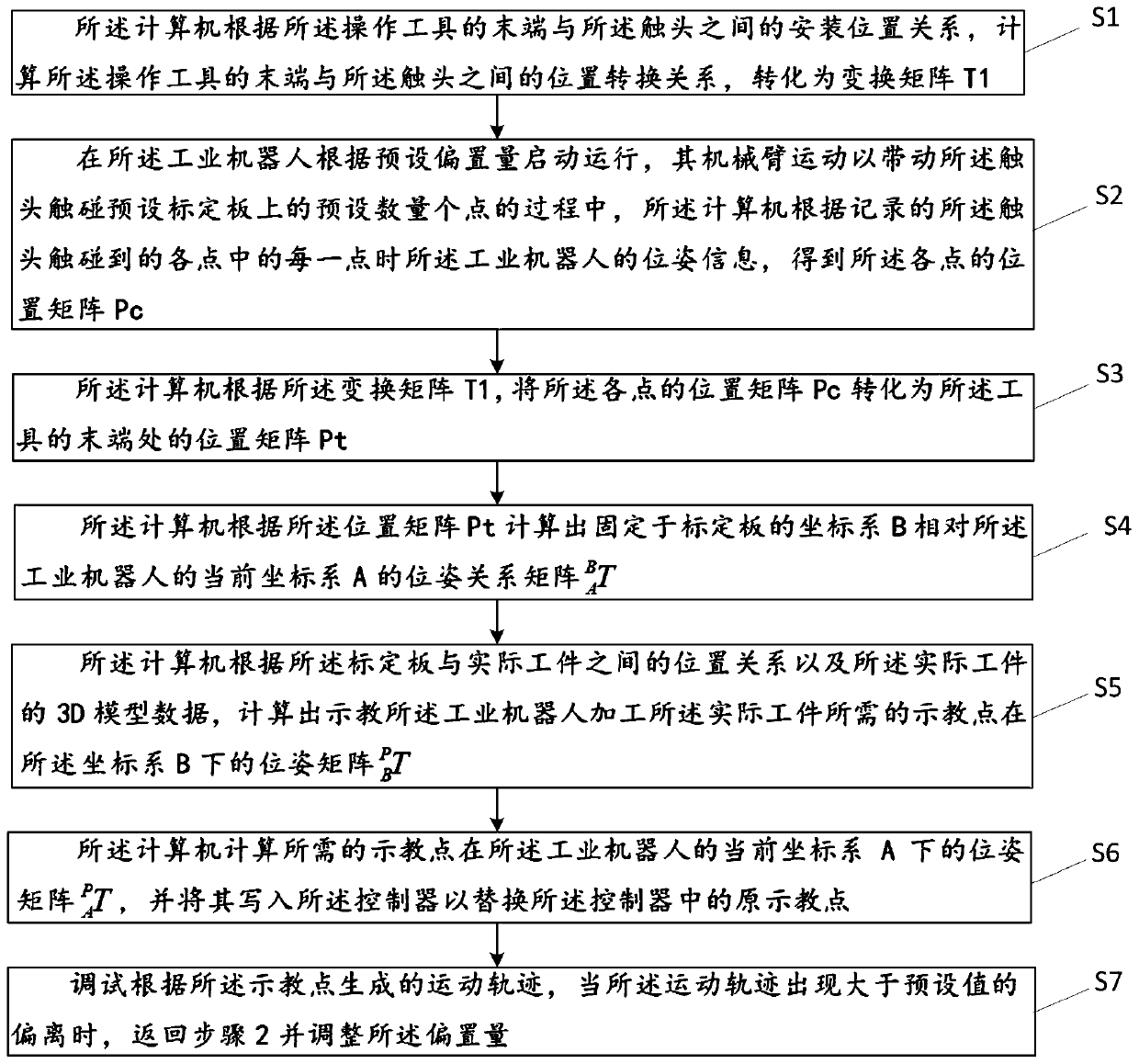
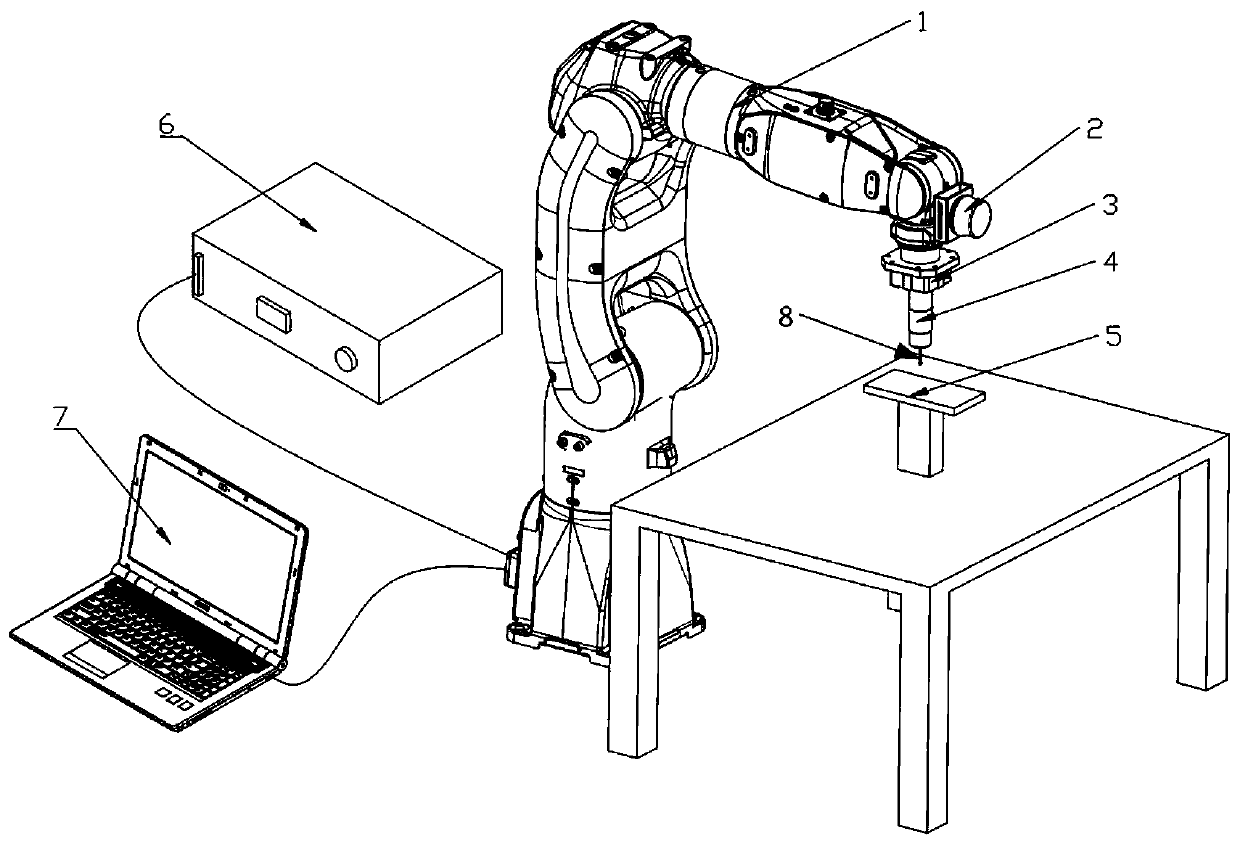
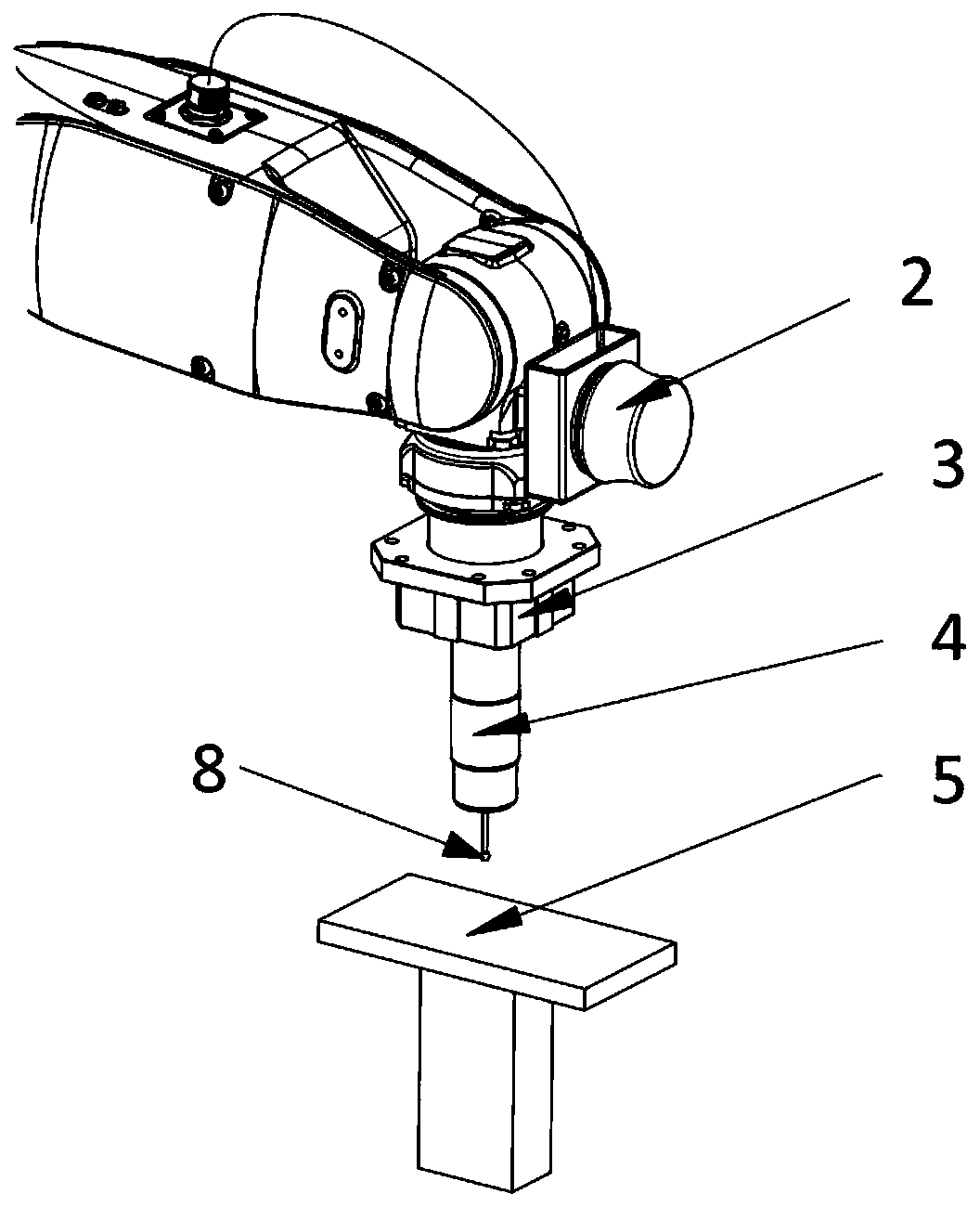
[0027] Such as figure 1 As shown, the embodiment of the present invention provides a fast teaching method of an industrial robot, which combines figure 2 with image 3 As shown, the industrial robot has a mechanical arm 1, the end of the mechanical arm 1 is equipped with an operating tool 3, the industrial robot is connected to the controller 6, and the end of the mechanical arm 1 is equipped with a drag component 2 which is connected to the controller 6. , A sensor 4 is installed at the end of the operating tool 3, and the sensor 4 is connected to the controller 6, specifically, it can be connected to the IO port input of the controller 6. The sensor 4 is provided with a contact 8, and the robot arm 1 is driven to move by dragging the dragging component 2 to d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More