Distributed collision-free movement planning method
A non-collision, distributed technology, applied in the field of game applications, can solve problems such as large amount of computation, affecting computing efficiency, high frequency, etc., to achieve the effect of improving efficiency, improving game experience, and balancing resource allocation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
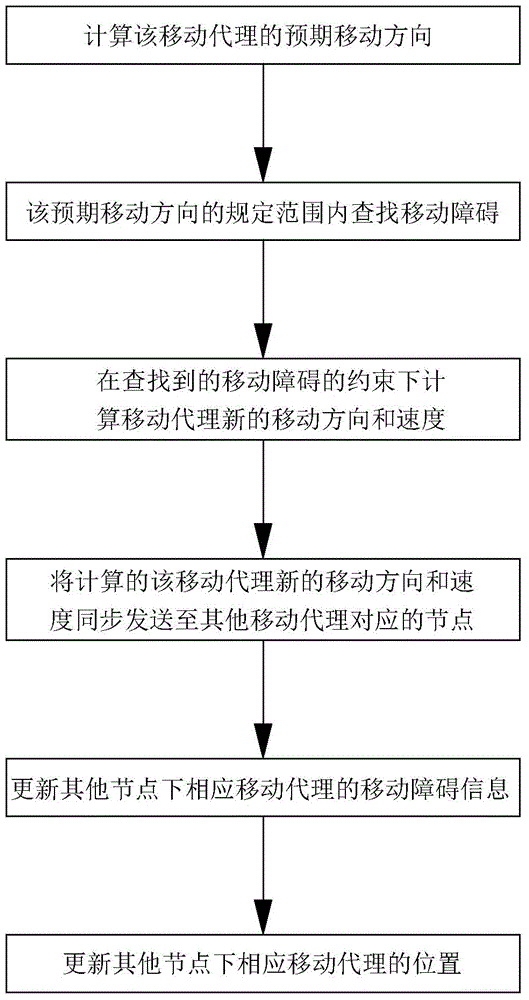
[0023] refer to figure 1 As shown, a method of distributed collision-free mobile planning of the present invention includes that when performing mobile planning for each mobile agent, the node corresponding to the mobile agent performs mobile planning for the mobile agent, specifically including:
[0024] The node calculates the expected moving direction of the mobile agent based on the expected moving destination, expected moving speed and static obstacles, where the expected moving destination is obtained from the user's input, the expected moving speed is the basic attribute of the mobile agent, and the static obstacle is the terrain properties;
[0025] Searching for moving obstacles within the prescribed range of the expected moving direction according to the expected moving direction of the mobile agent, where the moving obstacles include static terrain obstacles and dynamic obstacles caused to the current mobile agent by the existence of other mobile agents;
[0026] A...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com