

Pneumatic soft finger
A finger and soft technology, applied in the field of robot end effectors, can solve the problems of high manufacturing cost, difficult control, low manufacturing cost, etc., and achieve the effect of good grasping stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The specific implementation manner of the present invention will be described below in conjunction with the accompanying drawings.
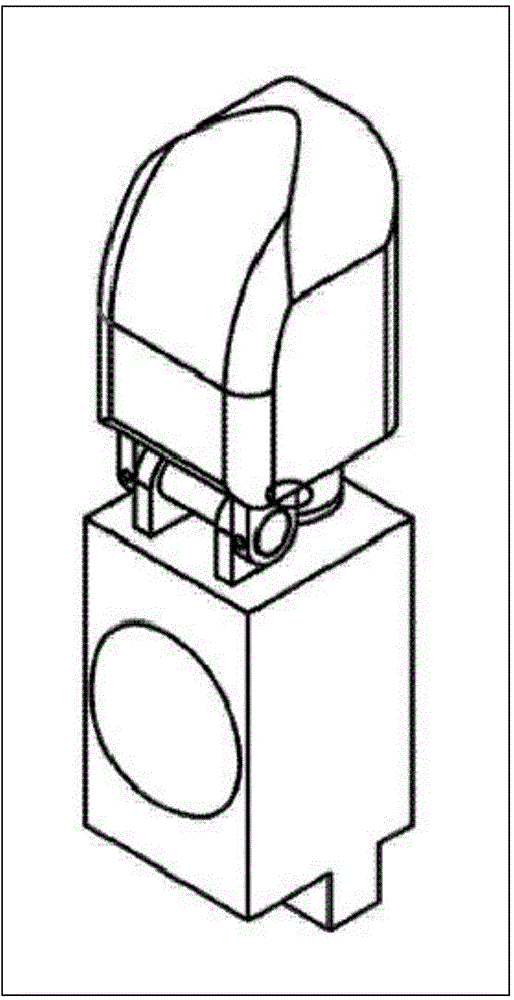
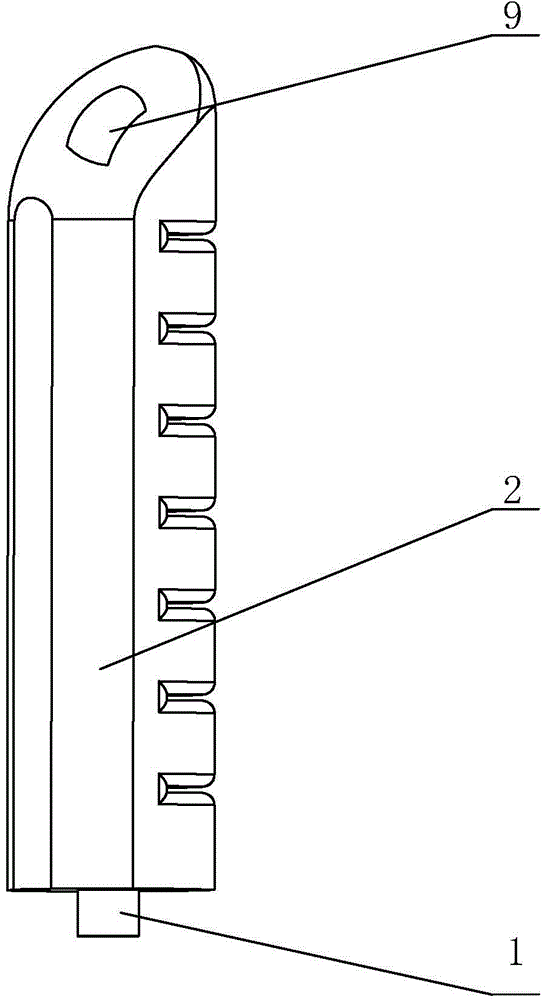
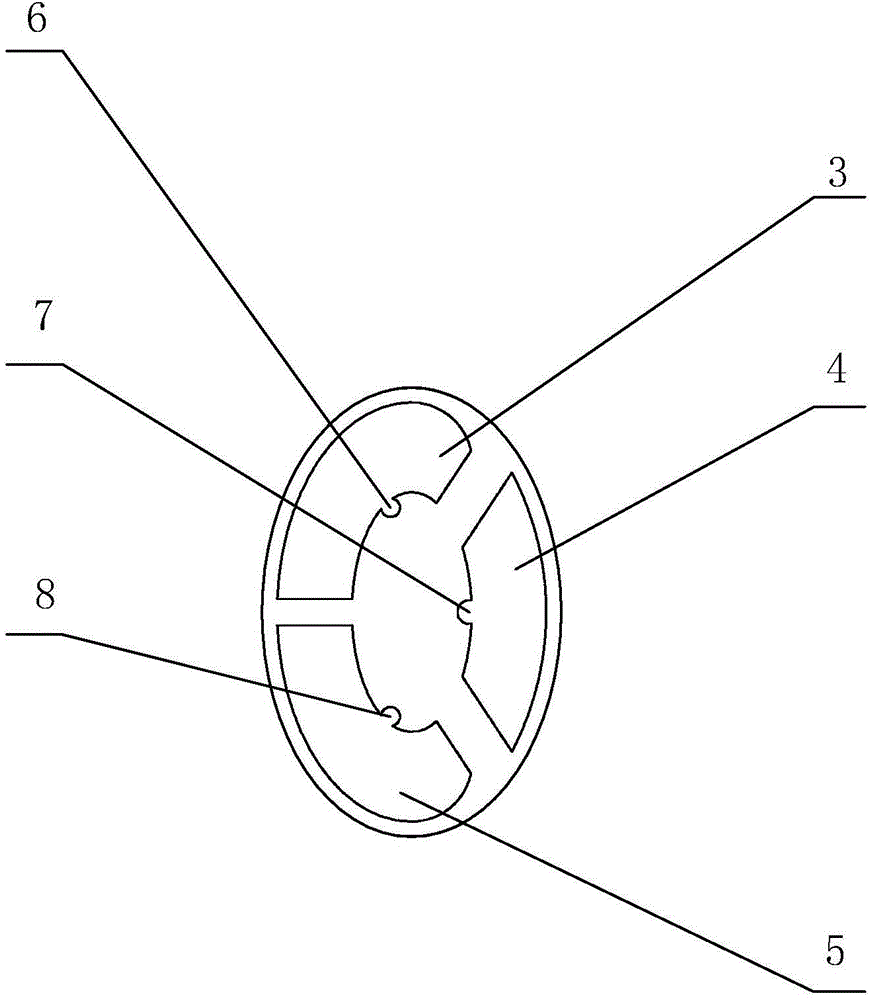
[0023] The pneumatic soft finger of the present embodiment comprises finger 2 and mounting pin 1 two parts (as figure 2 shown), a part of the mounting pin 1 is poured in the finger 2 and glued together with the finger 2, and a part is located outside the finger 2; there are three rows of gas storage cavities and three air passages inside the part of the finger 2, and the three rows The gas storage cavity and the three airways are all parallel to the central axis of the finger 2 and are distributed in a "product" shape; the left airway 6 is located on the side of the left cavity 3 close to the central axis of the finger 2 and communicates with the left cavity 3 , the right airway 8 is located at the side of the right cavity 5 close to the central axis of the finger 2 and communicates with the right cavity 5, and the middle airway 7 is loca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More