Apply picking manipulator
A manipulator and apple technology, applied in the field of agricultural product picking manipulators, can solve the problems of low labor productivity, low degree of automation and high labor intensity of fruit farmers, and achieve the effects of low production cost, convenient and flexible use, and simple maintenance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be described in detail below in conjunction with the accompanying drawings and examples.
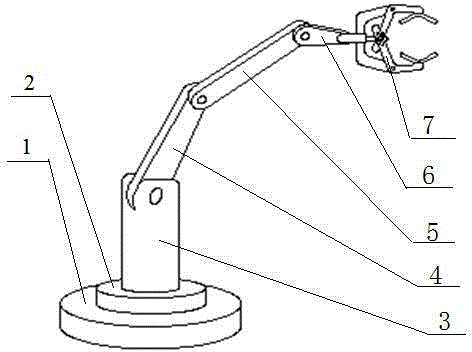
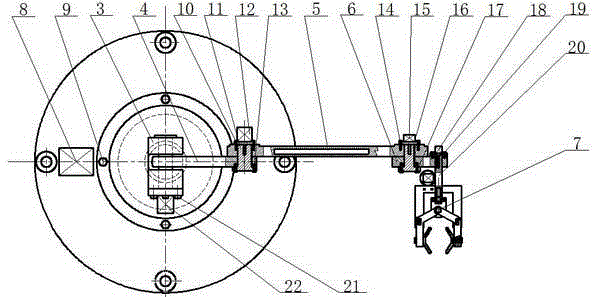
[0021] see figure 1 , figure 2 , a picking manipulator, comprising an end effector 7, the end effector 7 is connected with the wrist 6 through a wrist joint rolling motor 18, a rack 20, and the wrist 6 is through a wrist joint deflection motor 15, a wrist joint The deflection shaft 16 is connected with the forearm 5. The forearm 5 is connected with the big arm 4 through the elbow joint shaft 11 and the elbow joint motor 12. The big arm 4 is connected with the shoulder joint shaft 26, the shoulder joint end cover 27, Shoulder joint motor 22 is connected with column 3, and described column 3 is connected with base 1 through boss 2, waist joint large gear 25, waist joint pinion 24, waist joint motor 8;
[0022] see Figure 4 , the waist joint motor 8 is fixed on the base 1, through the meshing of the waist joint pinion gear 24 and the waist joint gear 2...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap