

Robot picking and recovering system for mandarin orange fruits and operation method
A recovery system and robot technology, applied in the field of agricultural robots, can solve problems such as difficult production, complex calculation, low efficiency, etc., and achieve the effect of simple and reliable structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the protection scope of the present invention is not limited thereto.
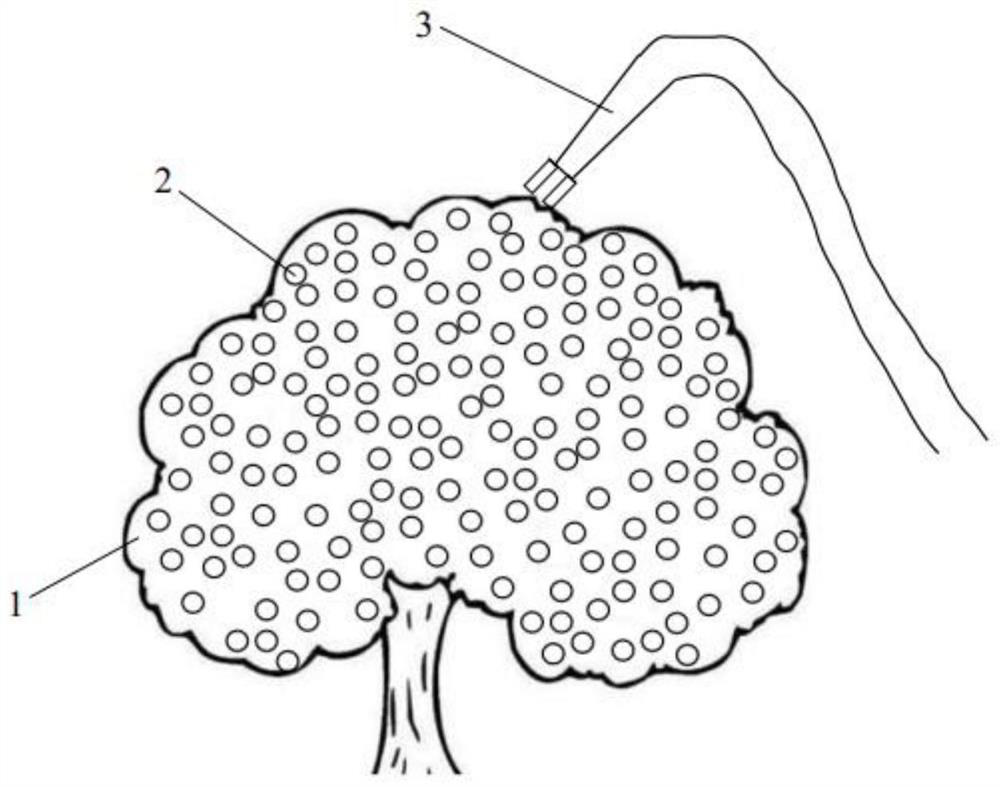
[0028] Such as figure 1 As shown, the tangerine canopy 1 is tightly sealed, and the fruit 2 is small and dense, and the closer to the top of the canopy 1, the denser it is. For the crown 1 in the upper part, the robot picking and recycling system 3 needs to complete the picking and recycling of the fruit 2 obliquely downward.
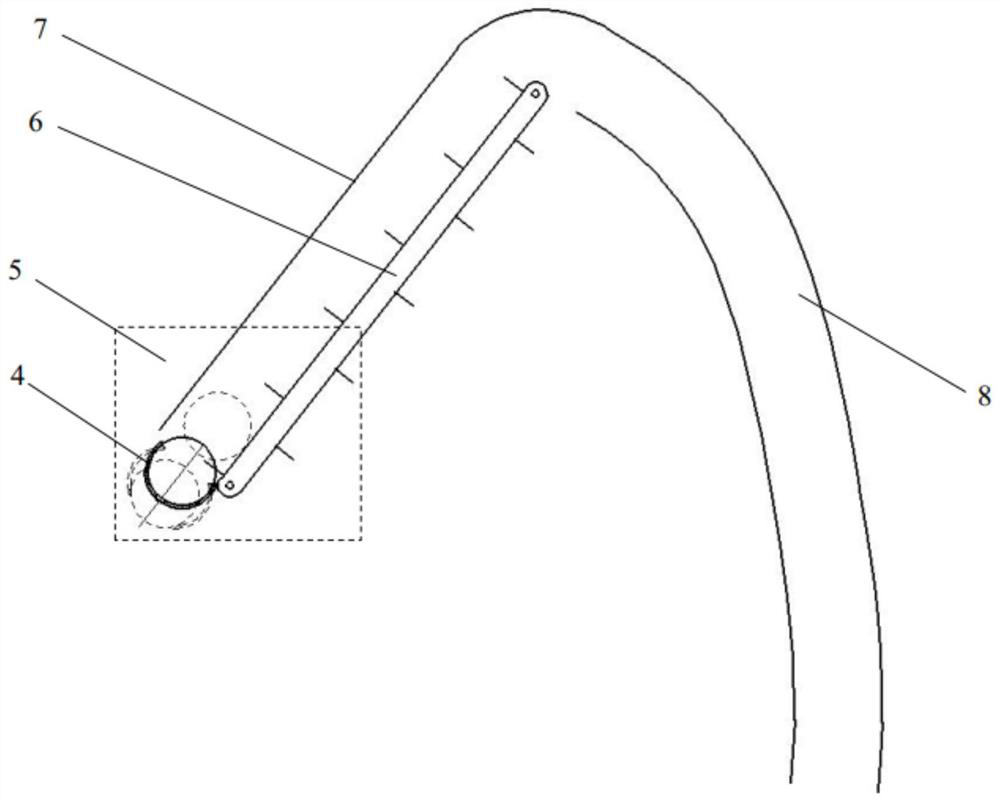
[0029] Such as figure 2 As shown, the robot picking recovery system 3 is composed of an end effector 4 and a fruit delivery device. The fruit conveying device includes a scraper conveyor 6, an outer plate 7 and a delivery hose 8, the outer plate 7 is parallel to the scraper conveyor 6 and is located on the upper side of the scraper conveyor 6, and the outer plate 7 is far away from the end of the end effector 4 It is connected with the upper mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More