

Fruit picking robot end actuator and harvesting method
An end effector and picking robot technology, applied in the field of agricultural robots, can solve the problems of complex control, low efficiency, low level of mechanization, etc., and achieve the effects of simplifying harvesting steps, simple overall structure, and improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
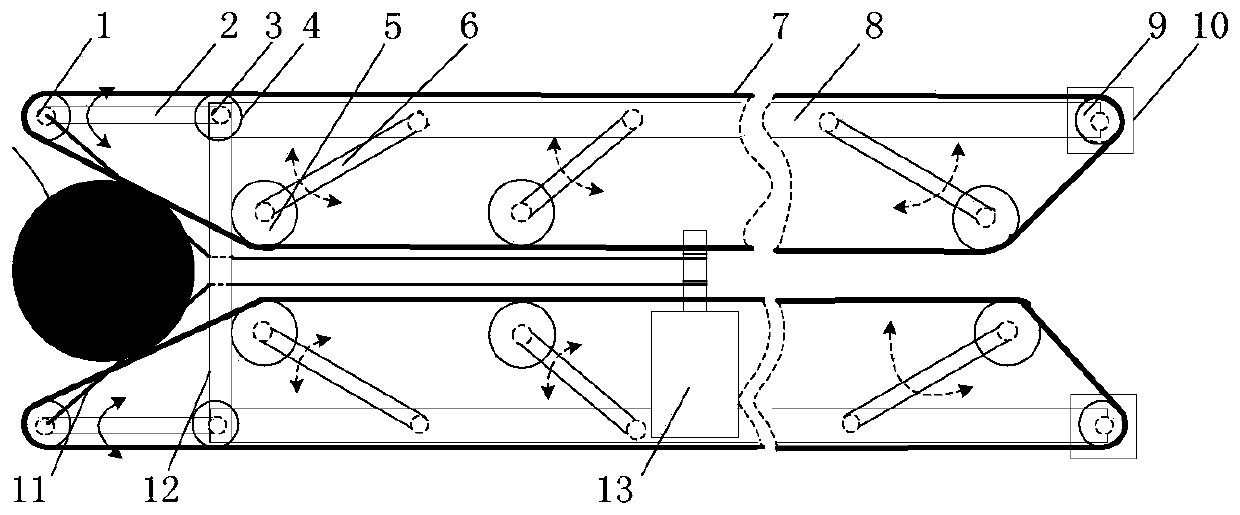
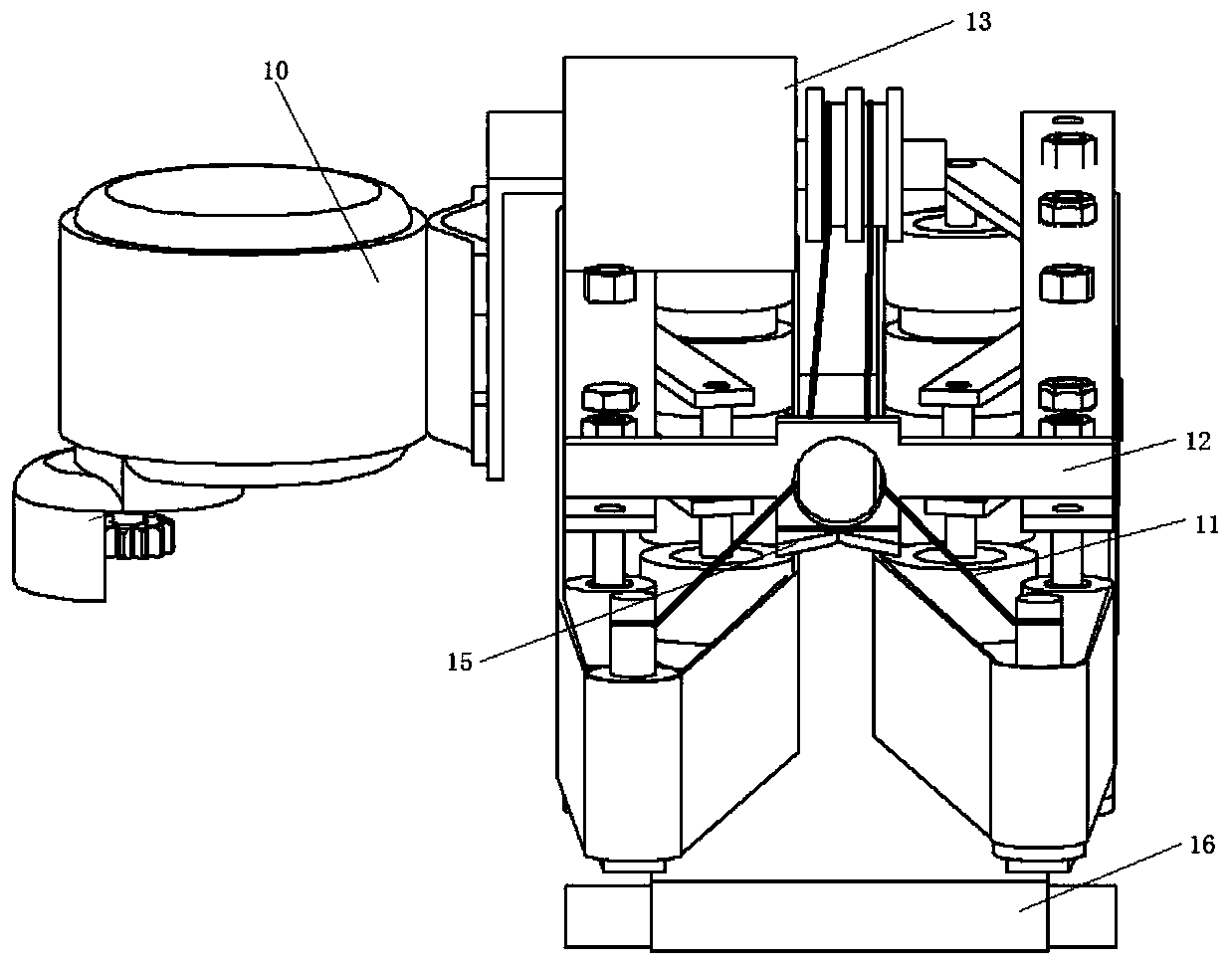
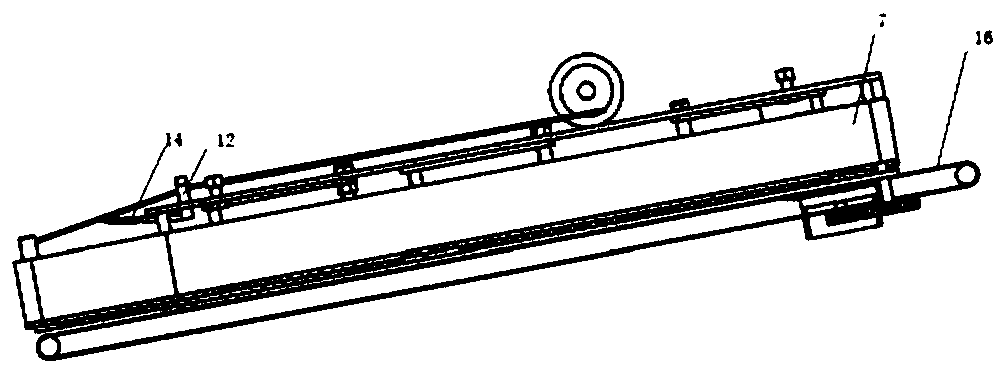
[0026] A fruit picking robot end effector of the present invention includes a frame 8, a flexible belt 7, a support wheel 5, a clamping adjustment mechanism, a floating adjustment mechanism, and a driving mechanism. The frame 8 is the skeleton of the entire end effector, and is used for fixing and installing various auxiliary mechanisms; the flexible belt 7 is used for clamping and picking fruit, and transporting the fruit; the support wheel 5 is used for supporting the flexible belt 7 , to maintain its tension state; the guide mechanism is used to guide the feeding of the fruit and complete the cutting of the fruit handle; the floating adjustment mechanism can adjust the rotation angle according to the size of the fruit and change the opening size of the end effector; The above-mentioned clamping adjustment mechanism is used to change the size of the clamping force to complete the clamping and picking of the fruit; the above-mentioned driving mechanism is used to drive the fle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More