

Uncertainty-prediction-based track planning method
A technology of uncertainty and track planning, applied in special data processing applications, instruments, electrical digital data processing, etc., can solve the unpredictable deviation of moving bodies, do not consider the kinematic constraints of moving bodies, and do not consider the process of moving bodies Issues such as the impact of noise and observation noise
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0033] The present invention will be described in detail below in conjunction with the accompanying drawings.
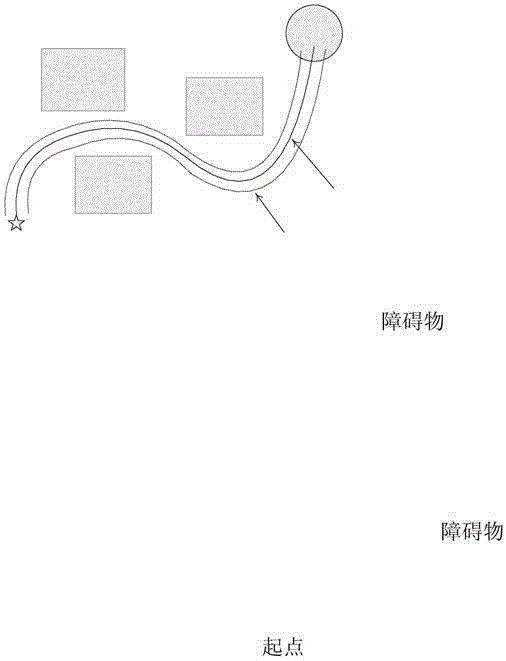
[0034] The track planning method based on uncertainty prediction of the present invention utilizes the dynamic model of the moving body, the process noise model and the observation noise model, and divides the deviation of the real track into the deviation of the real track from the estimated track and the estimated track The sum of deviations from the planned trajectory predicts the uncertainty of the true trajectory in probabilistic form. On this basis, combined with the rapid extended random tree method, considering the dynamic constraints of the moving body and the uncertainty constraints of the trajectory, a feasible trajectory is planned.
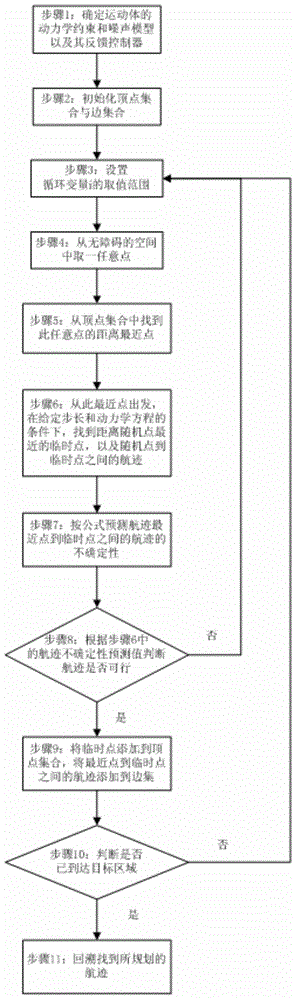
[0035] The following combined process figure 1 , the implementation process of the present invention's trajectory planning method based on uncertainty prediction is given, and its specific steps are as follows:
[0036] St...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More