

Vehicle collision avoidance dynamic safety path planning method based on accurate trajectory prediction
A dynamic safety and path planning technology, applied in the field of advanced assisted driving and automatic driving, can solve the problems of optimal trajectory prediction accuracy at the same time, low vehicle trajectory prediction accuracy, and inability to guarantee the feasibility of collision avoidance path tracking, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0117] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the drawings in the embodiments of the present invention. Obviously, the described embodiments are part of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts shall fall within the protection scope of the present invention.
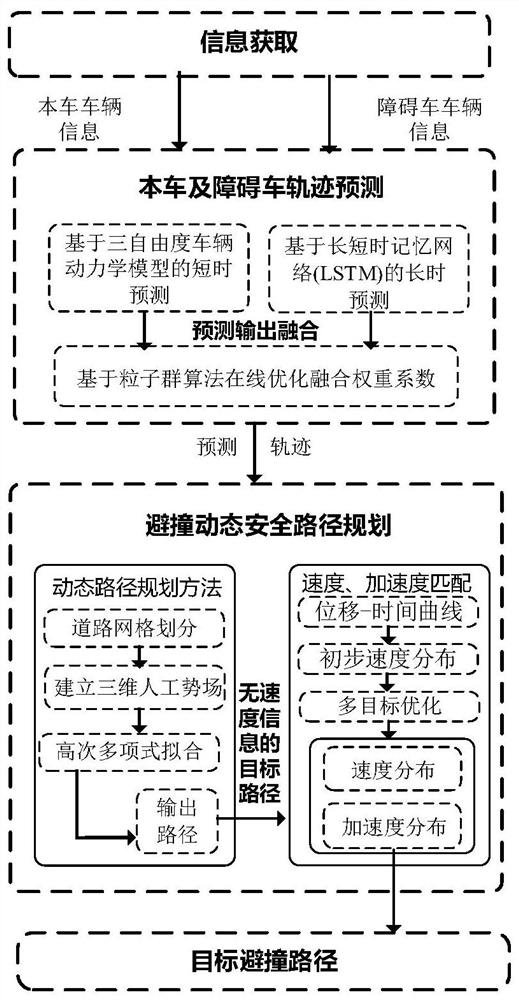
[0118] A dynamic safety path planning method for vehicle collision avoidance based on precise trajectory prediction, the process is as follows figure 1 shown, including:
[0119] Step 1: Obtain the vehicle status information and parameter information of the vehicle and the obstacle vehicle;
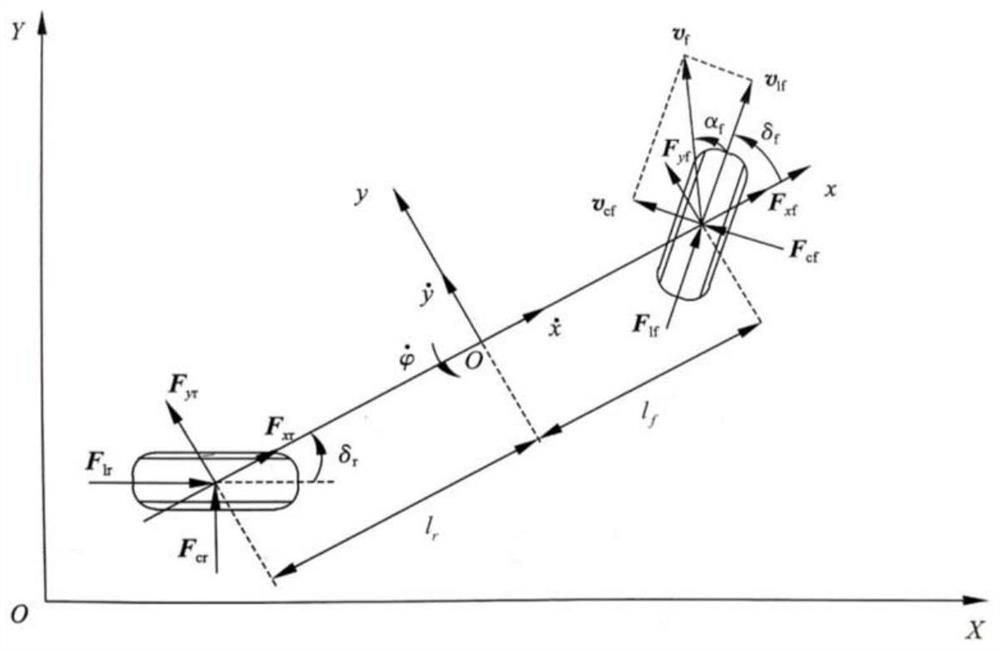
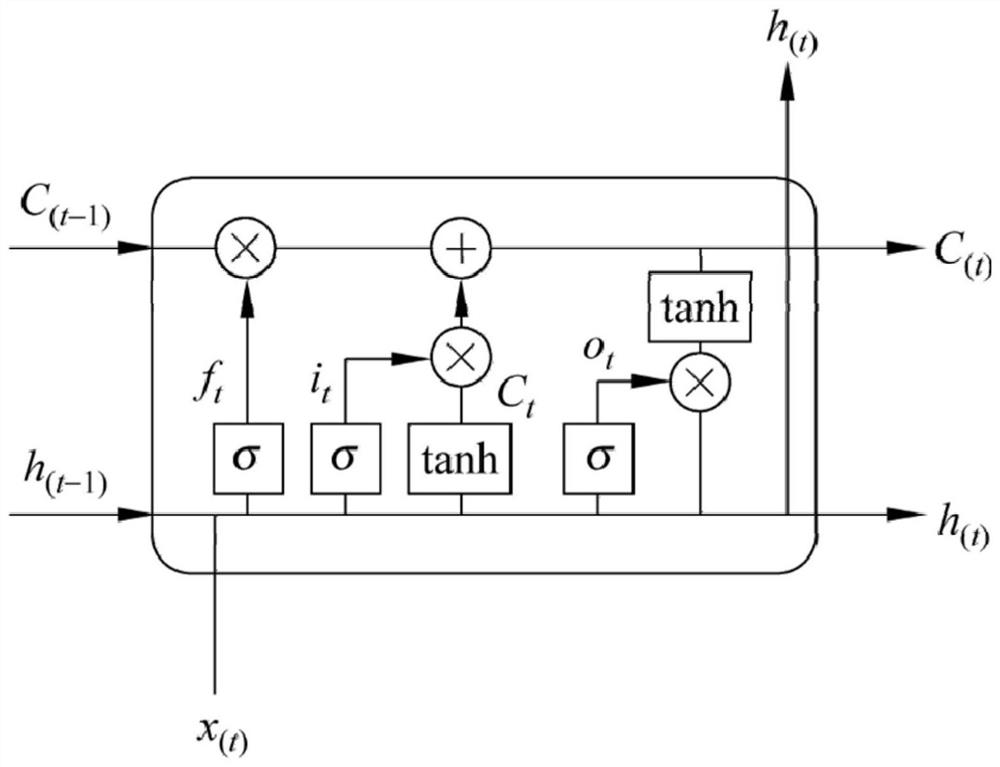
[0120] Step 2: Construct a vehicle trajectory prediction model based on the three-degree-of-freedom vehicle dynamics model and the long-short-term memory recurrent n...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More