

Human muscle movement perception based menu selection method for human-computer interaction interface
A human-computer interaction interface and menu selection technology, applied in the field of human-computer interaction, can solve the problems of insufficient fit, shaking or even falling, and lack of humanization, and achieve the effect of convenient control, simplified learning process, and humanized operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The technical scheme of the present invention is described in detail below in conjunction with accompanying drawing and embodiment:
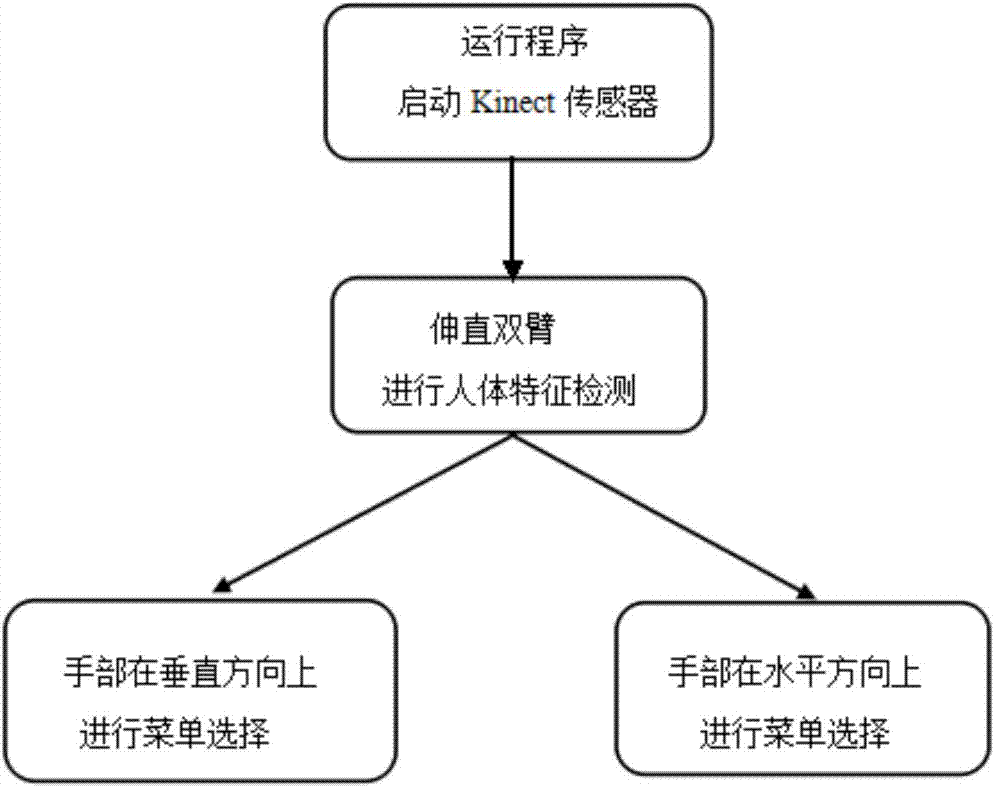
[0034] The human-computer interaction interface menu selection method based on human muscle kinesthetic perception requires a hardware system that at least includes a Kinect sensor, a host computer (computer) connected to the Kinect sensor and a display screen connected to the host computer. The overall flow of the method is as follows: figure 1 shown, including the following steps:
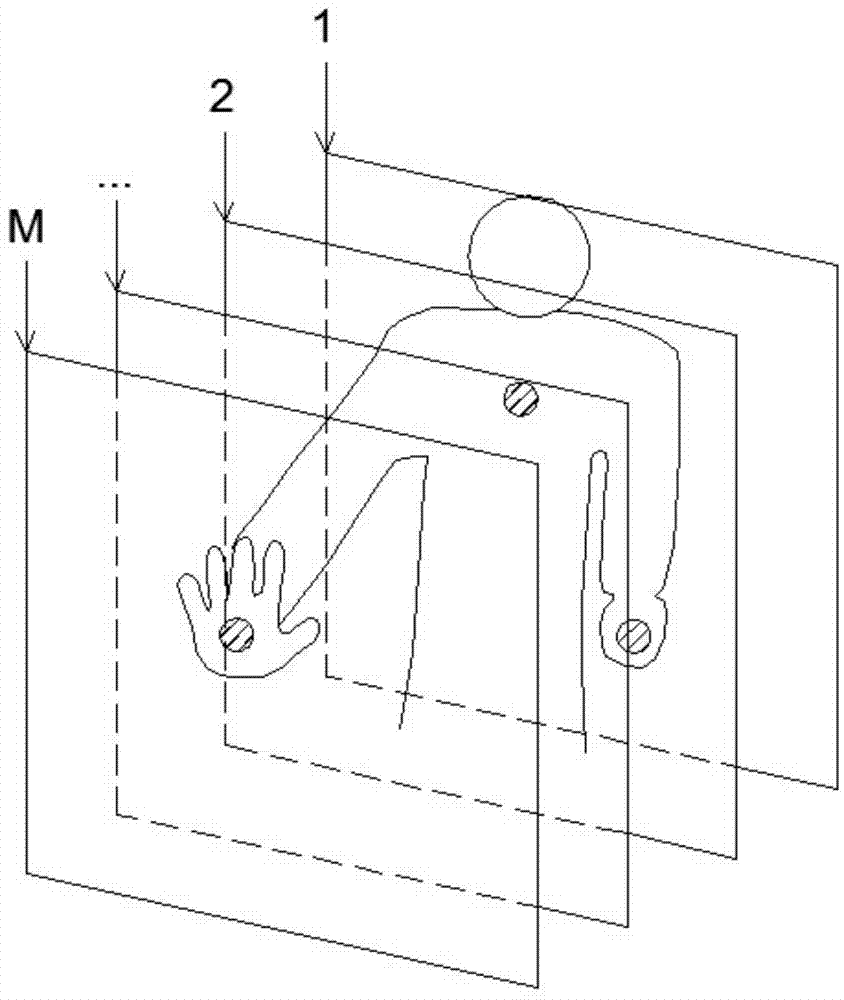
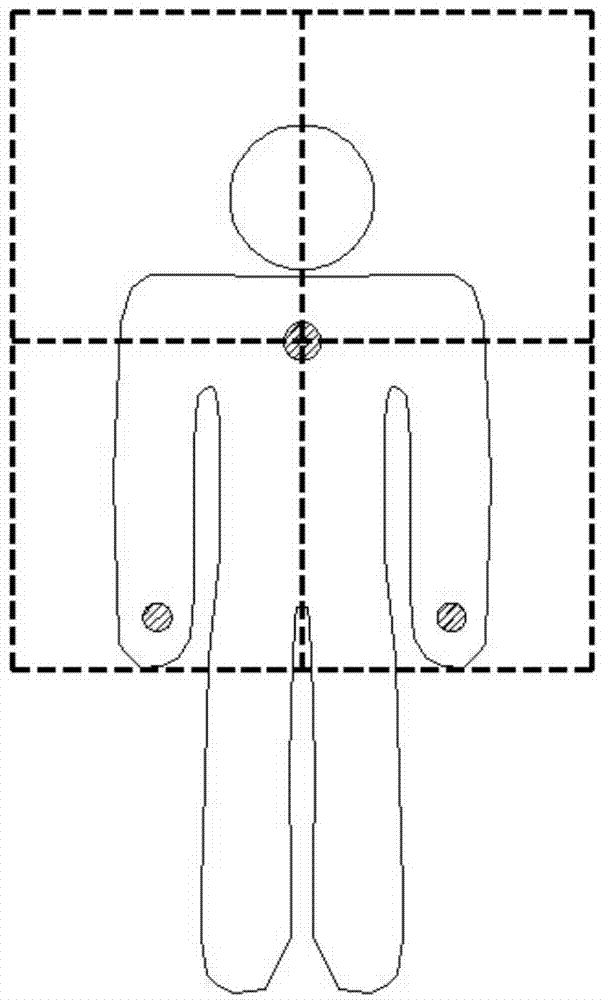
[0035] Step 1. Initialization parameter setting: according to the needs of the user, respectively set the number of space divisions of the space in front of the human body in the horizontal direction and the vertical direction.
[0036] Connect the Kinect sensor, and use the Kinect sensor to obtain information on the positions of various joints of the human body. Here we mainly obtain the three joint points of the user's middle chest (the midpoint of the hum...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More