

Electronic nose drift general calibration method based on convex set projection and extreme learning machine
A technology of extreme learning machine and convex set projection, which is applied in scientific instruments, computer components, standard gas analyzers, etc., can solve the problems of domain migration ability and generalization limitations, poor generalization, and gas identification applications, etc., to achieve Good generalization and migration ability, improved gas recognition accuracy, and simple learning process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The embodiment of the present invention will be explained in detail below in conjunction with the accompanying drawings. The examples given are only for the purpose of illustration, and cannot be interpreted as limiting the present invention. The accompanying drawings are only for reference and description, and do not constitute the scope of patent protection of the present invention. limitations, since many changes may be made in the invention without departing from the spirit and scope of the invention.
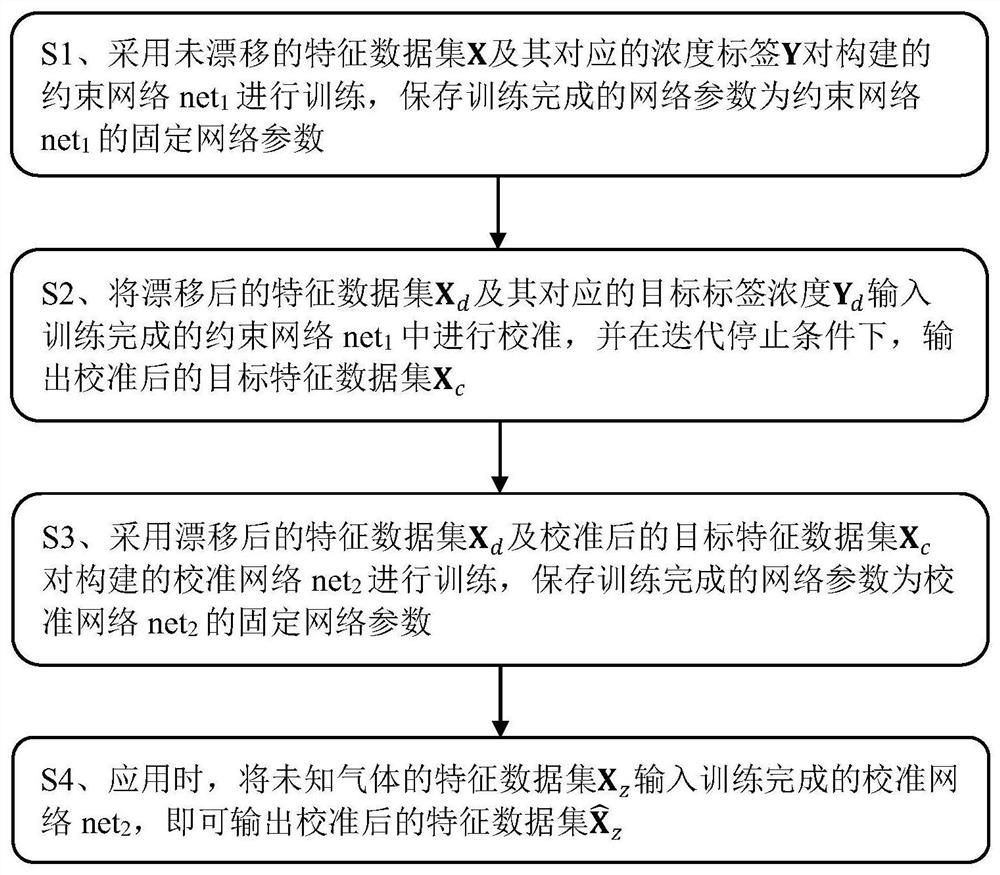
[0058] In order to improve the gas recognition accuracy and generalization of the electronic nose after its gas sensor drifts, the embodiment of the present invention provides a general calibration method for electronic nose drift based on convex set projection and extreme learning machine, such as figure 1 , 4 shown, including steps:
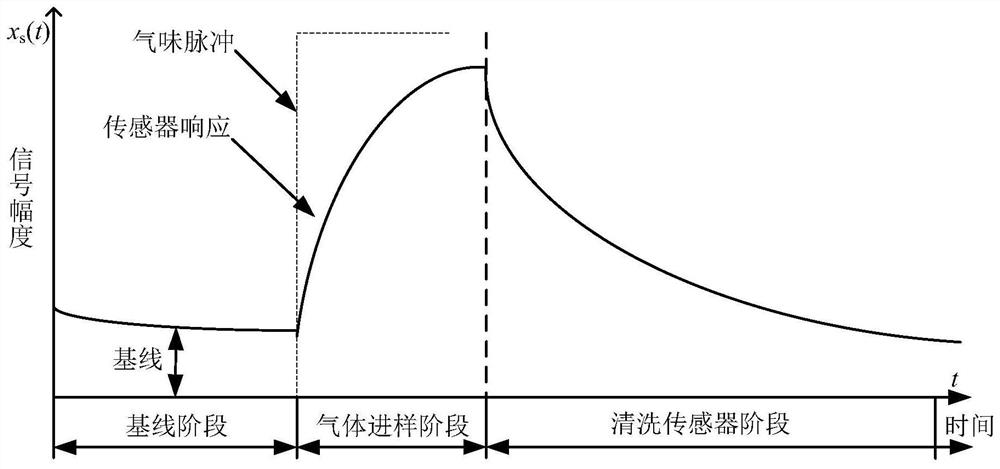
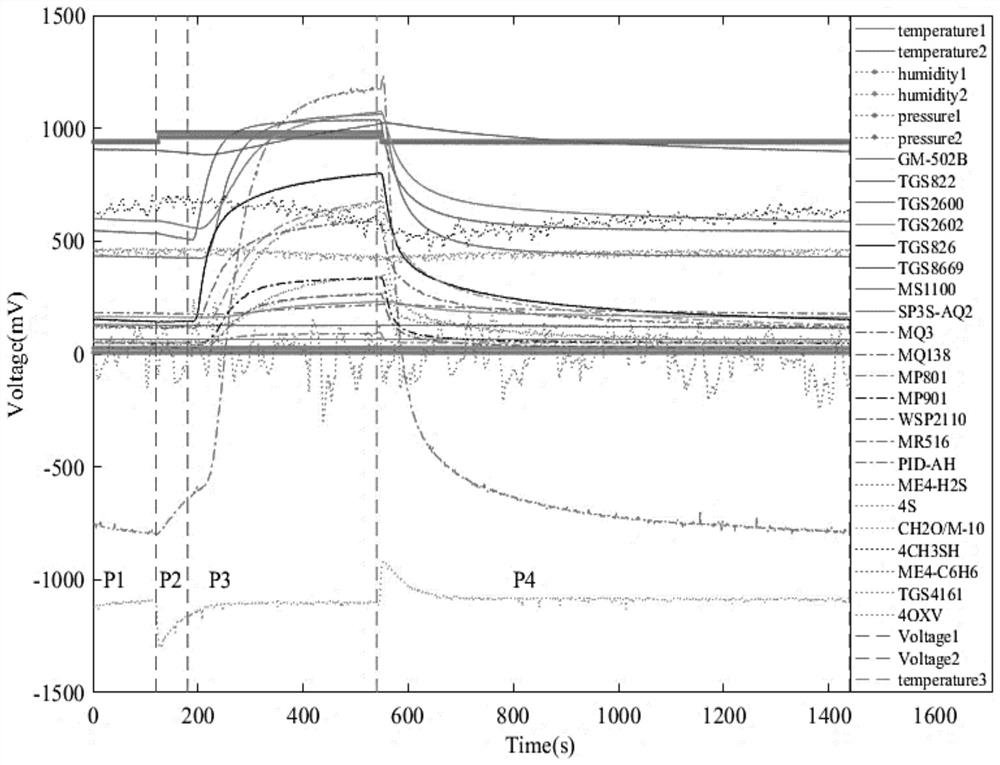
[0059] S0. Collect the undrifted and drifted output responses of a sensor array composed of multiple sensors in a variety of standa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More