Flying path planning method of unmanned plane capable of intelligently identifying threat types
A path planning, UAV technology, applied in three-dimensional position/channel control and other directions, can solve problems such as unpredictable UAV threats
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] The present invention will be described in detail below with reference to the accompanying drawings and examples.
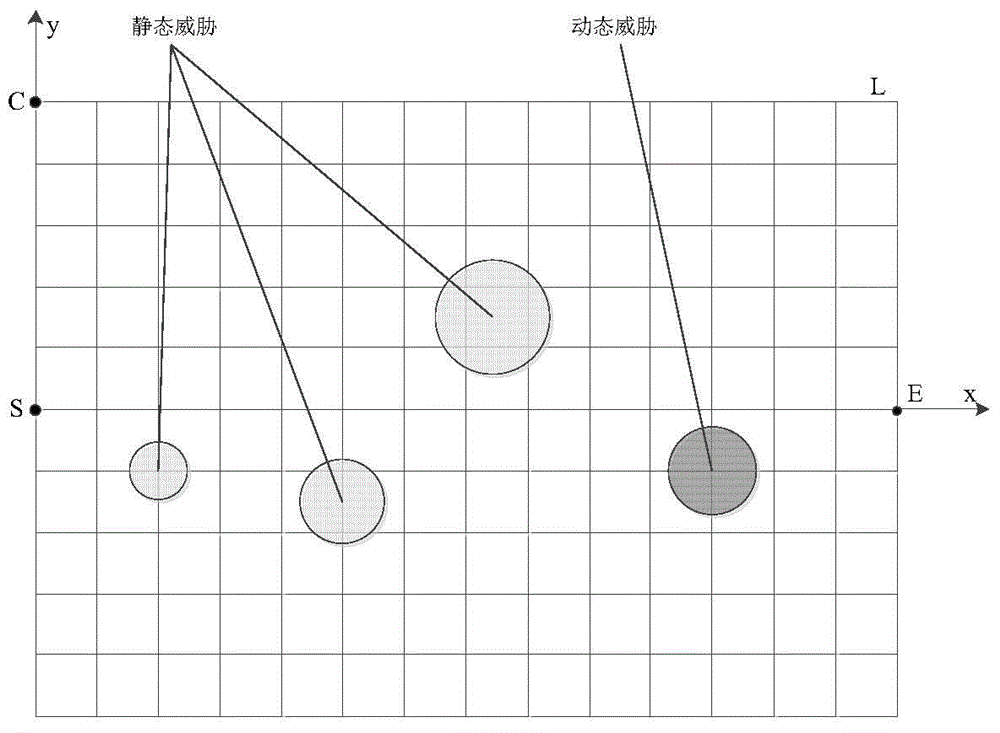
[0063] Rasterize the search area: An analysis of threats including mountains, electromagnetics, and radars reveals that most of the areas they cover are approximately circular areas with the threat source as the center and the threat range as the radius. Therefore, in the process of modeling the threat area in this paper, the threat area is regarded as a circle. In addition, the grid method is currently the most widely studied space path calculation method, which divides the searchable flight space of UAVs into multiple simple areas, called grids.
[0064] Based on the two-dimensional description of the entire space, the search area is divided by the grid method. In practice, considering that the current average speed of the UAV is Mach 4.3 (about 1430m / s), the adjacent grids are set The length of grid nodes is 1500m. Such as figure 1 As shown, its spec...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Length | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More