

Walking aid lower limb of exoskeleton robot
An exoskeleton robot, lower limb technology, applied in the direction of equipment to help people walk, physical therapy, etc., can solve the problems of affecting the wearing comfort of wearable devices, secondary injury to the wearer, dislocation of knee joint movement, etc., to improve safety. and wearing comfort, eliminating motion dislocation between joints, and solving the effect of tangential rotation deviation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
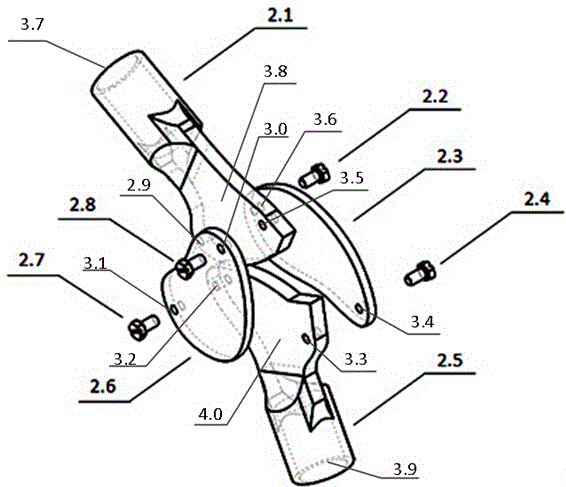
[0029] Embodiment 1, the first connecting rod 2.3 and the second connecting rod 2.6 in the bionic knee joint 1.3 are arranged at an angle, and the first connecting rod 2.3 and the second connecting rod 2.6 are arranged at the connecting rod rotating end 3.8, machine The two sides of the frame rotating end 4.0, the specific setting method can be as follows figure 2 Shown:
[0030] Screw hole 1 3.6 of the first connecting frame rod 2.3 is connected with screw hole 2 2.9 of the connecting rod rotating end 3.8 through screw 1 2.2; screw hole 3 3.4 of the first connecting frame rod 2.3 is connected with the rotating end of the frame The screw hole four 3.3 of 4.0 is connected by screw two 2.4; the screw hole five 3.0 of the second link frame 2.6 is connected with the screw hole six 3.5 of the connecting rod rotating end 3.8 by screw three 2.8; the second connecting rod Screw hole seven 3.1 of frame 2.6 is connected by screw four 2.7 with screw hole eight 3.2 of frame rotating end...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More