

Augmentor and substitution realization method
A robot and robot body technology, applied in the field of robotics, can solve the problems of poor interaction, failure to deal with emergencies, and inability to completely replace manual labor, etc., to achieve strong interaction and ensure the safety of personnel
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
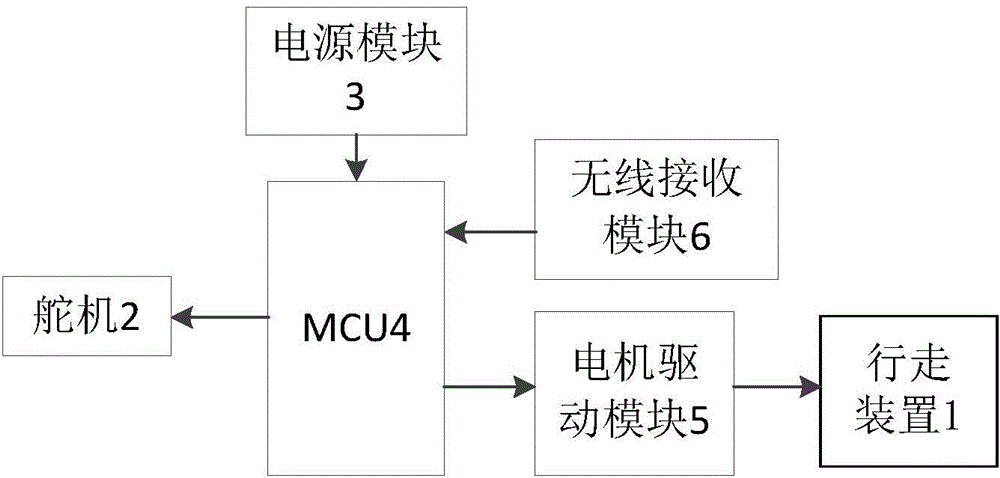
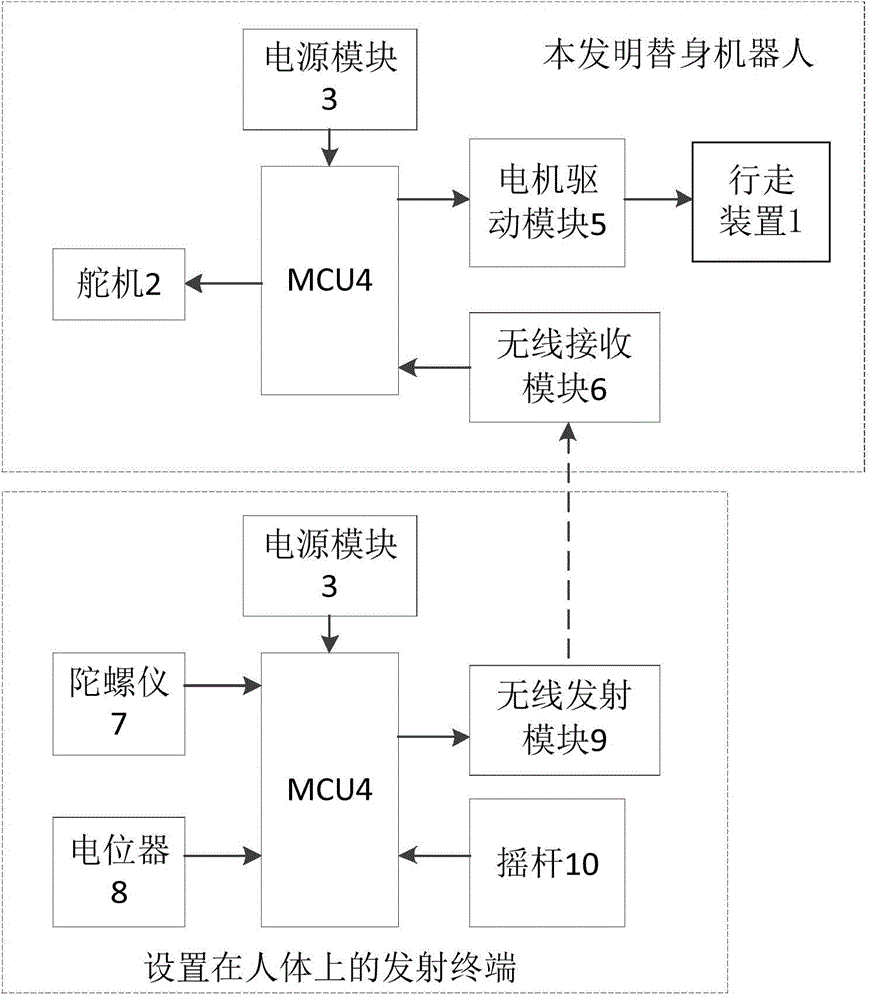
[0019] Such as figure 1 As shown, the present invention provides a stand-in robot, which includes a robot body (not shown in the figure), a walking device 1 , a steering gear 2 , a power supply module 3 , an MCU 4 , a motor drive module 5 and a wireless receiving module 6 . The running device 1 is arranged below the robot body, and the running device 1 adopts wheels or crawler belts.
[0020] Nine steering gears 2 are arranged on the robot body, wherein the first steering gear is arranged on the head of the robot body, the second steering gear is arranged at the wrist of the left mechanical arm, and the third steering gear is arranged at the elbow of the left mechanical arm. The fourth and fifth servos are set at the shoulder of the left robotic arm, the sixth servo is set at the wrist of the right robotic arm, the seventh servo is set at the elbow of the right robotic arm, the eighth and ninth servos are Set at the shoulder of the right robotic arm. By setting the steering ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More