

Air-ground amphibious dual-ring shape-shifting robot
A robot, land-air technology, applied in the field of land-air amphibious double-ring deformation robots, can solve the problems of complex structure, indeformable volume, slow walking speed, etc. less effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Below in conjunction with accompanying drawing and embodiment the present invention is further described.
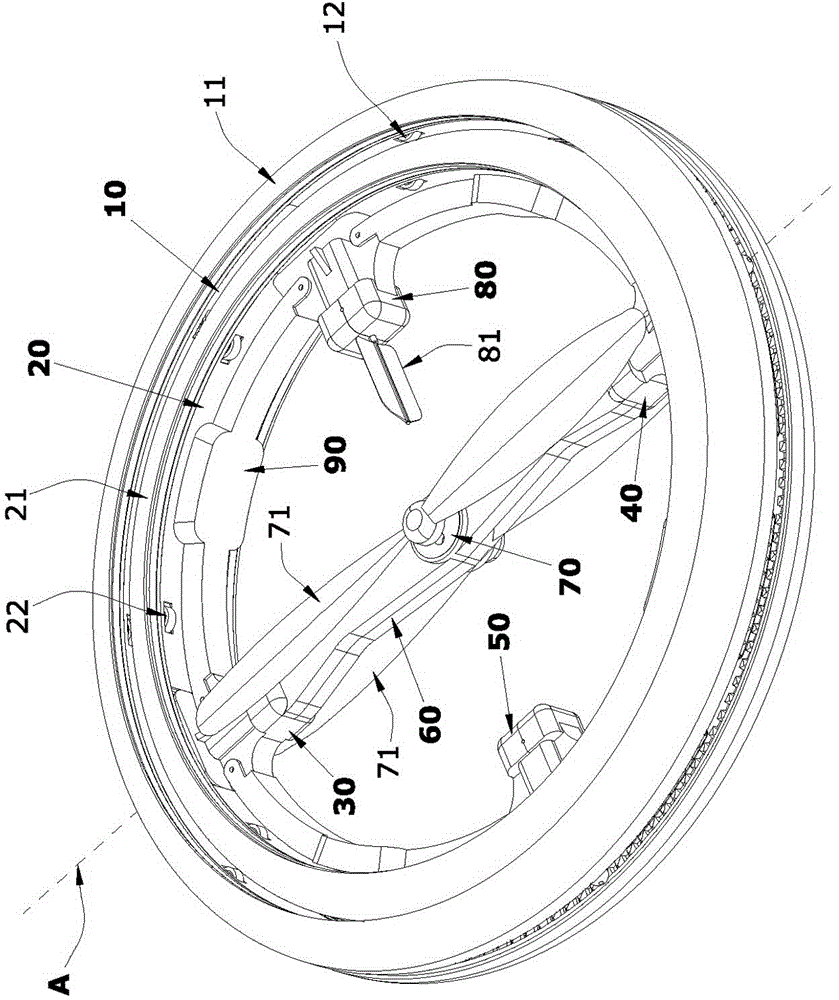
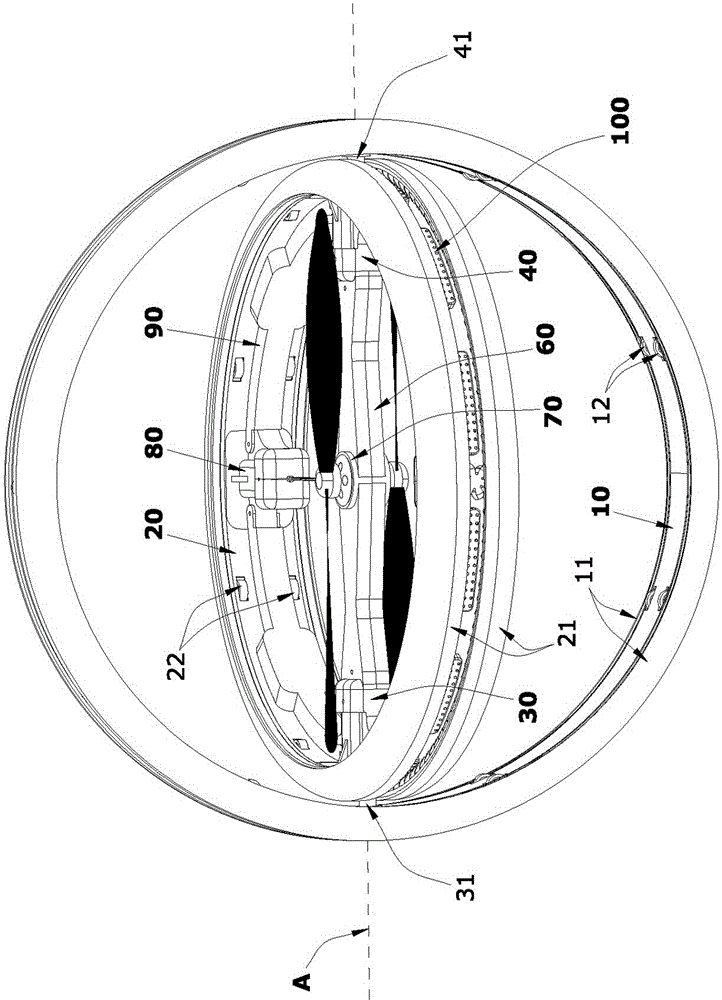
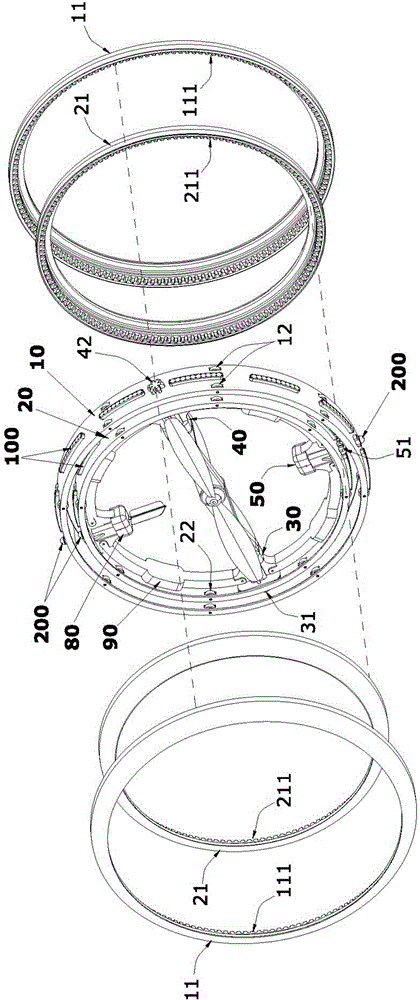
[0032] Such as figure 1 and figure 2 A kind of ground-air amphibious double-ring deformation robot shown, it comprises: an outer ring 10 and an inner ring 20 that are nested and hinged at two ends on a radial direction A to rotate and fit, the outer ring 10 of the outer ring 10 Two outer rims 11 that can rotate around its axial direction are sleeved on the radial surface, and two inner rims 21 that can rotate around its axial direction are sleeved on the outer diameter surface of the inner ring 20; Also be fixed with an angle motor 30 for changing the relative folding angle of the outer ring 10 and the inner ring 20, an outer ring motor 40 for driving and connecting the outer ring 11 to rotate, one for driving and connecting the inner ring 21 to rotate Inner ring motor 50 and an electric control module 60 for aeromodelling; two flight control motors 70 are ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More