

Flight control method and device for unmanned aerial vehicle
A technology for unmanned aerial vehicles and flight control, which is applied in the field of aircraft and can solve problems such as unsatisfactory requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
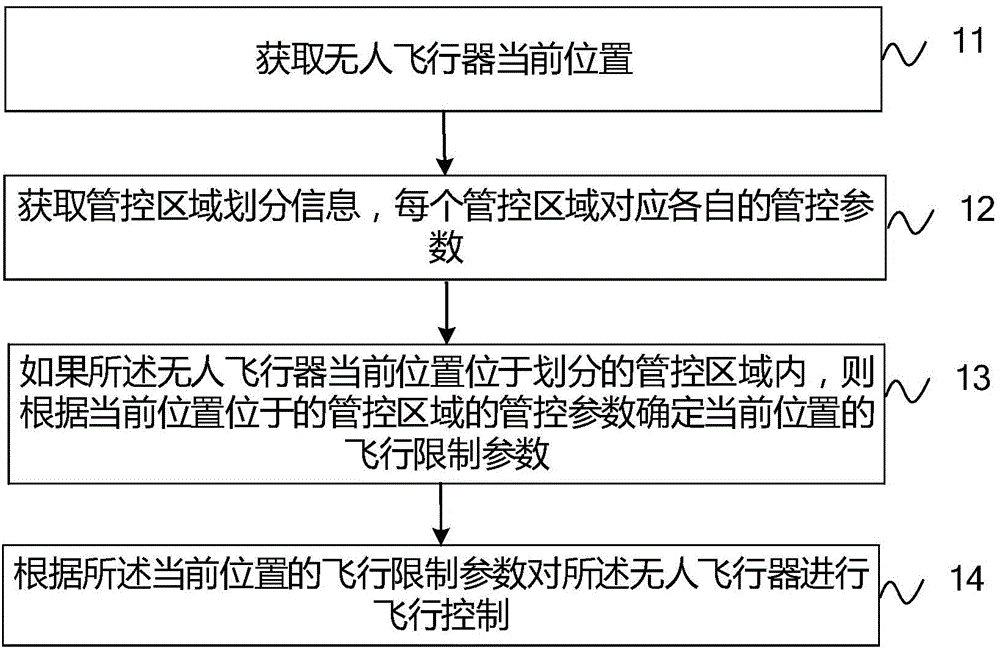
[0054] like figure 1 As shown, an embodiment of the present invention provides a flight control method for an unmanned aerial vehicle, including:
[0055] 11. Obtain the current position of the UAV.
[0056] Specifically, the embodiment of the present invention can obtain the current position of the UAV in various ways, and the embodiment of the present invention does not limit the manner of obtaining the current position of the UAV. For example, the location of the UAV is acquired in real time by a GPS module installed on the UAV, and the current location of the UAV is obtained, for example, according to the GPS signal combined with electronic map data.
[0057] 12. Obtain information on the division of control areas, and each control area corresponds to its own control parameters.
[0058] The control parameters include at least one of the following parameters: a maximum flight altitude, a minimum flight altitude, a maximum flight speed, and a minimum flight speed.
[005...
Embodiment 2
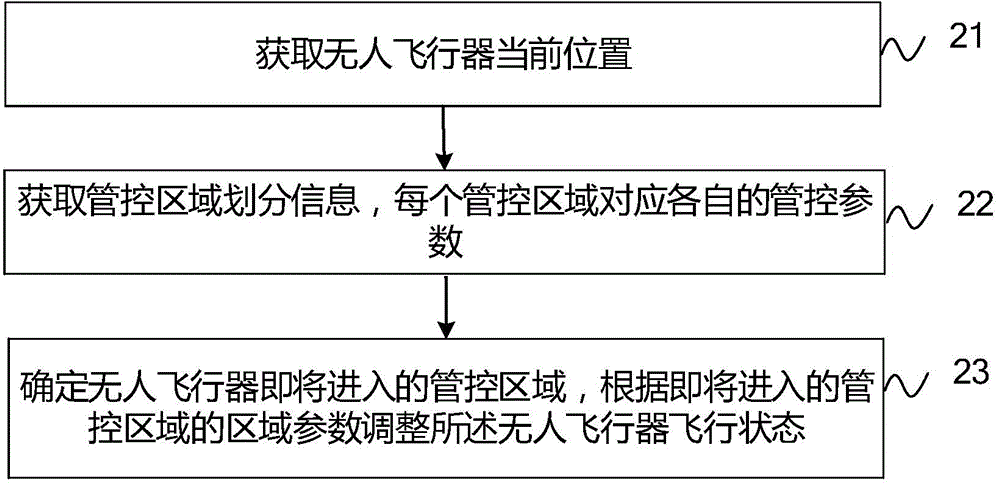
[0077] like figure 2 As shown, the present embodiment provides a method for controlling the flight of an unmanned aerial vehicle including:
[0078] 21. Obtain the current position of the UAV.
[0079] 22. Obtain the control area division information, and each control area corresponds to its own control parameters.
[0080] The above steps 21 and 22 can be implemented with reference to steps 11 and 12 in Embodiment 1, and details are not described here.
[0081] 23. Determine the control area that the unmanned aerial vehicle is about to enter, and adjust the flight state of the unmanned aerial vehicle according to the area parameters of the control area that is about to enter.
[0082] Wherein, the control parameters of the control area to be entered may include one or more of the maximum flight altitude, the minimum flight altitude, the maximum flight speed, and the minimum flight speed. For example, if the current flight altitude is less than the minimum flight altitude ...
Embodiment 3
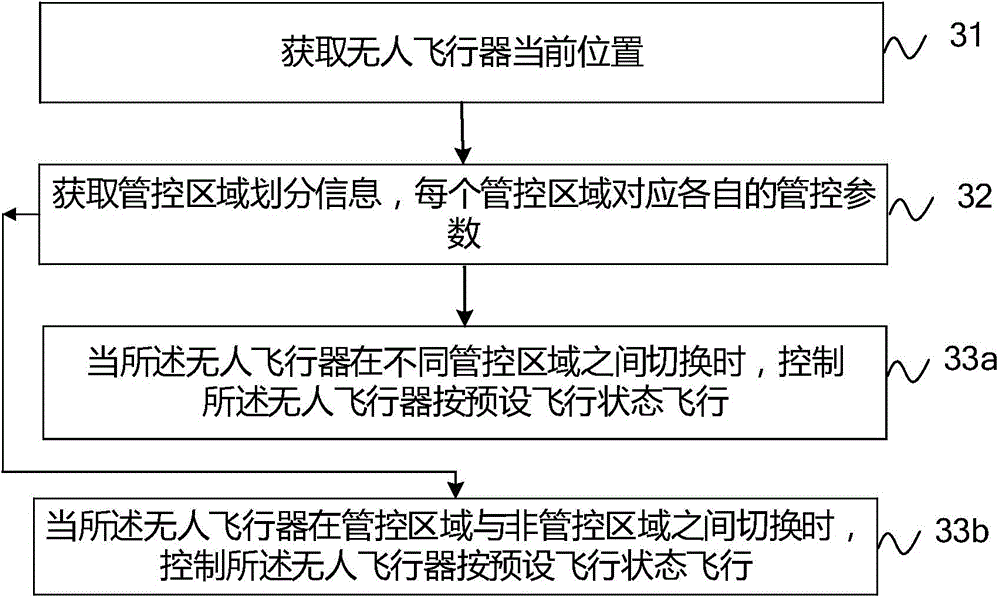
[0085] like image 3 As shown, the present embodiment provides a method for controlling the flight of an unmanned aerial vehicle including:
[0086] 31. Obtain the current position of the UAV.
[0087] 32. Obtain information on the division of control areas, and each control area corresponds to its own control parameters.
[0088] The above steps 31 and 32 can be implemented with reference to steps 11 and 12 in Embodiment 1, and details are not described here.
[0089] 33a. When the UAV switches between different control areas, control the UAV to fly in a preset flight state.
[0090] 33b. When the UAV is switched between a controlled area and a non-controlled area, control the UAV to fly in a preset flight state.
[0091] Wherein, the above-mentioned parameters set in the preset flight state include but are not limited to parameters such as flight altitude and flight speed.
[0092] The method of this embodiment switches between different areas, and the unmanned aerial ve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More